
|
|
Статические и динамические характеристики.I - основы теории автоматического управления Состав системы автоматического управления. Для осуществления автоматического управления техническим процессом создается система, состоящая из управляемого объекта(УО) и связанного с ним управляющего устройства(УУ). Как и любое техническое сооружение, система должна обладать конструктивной жесткостью и динамической прочностью. Это означает, что система должна быть способной выполнять свои функции с требуемой точностью, несмотря на инерционные свойства и неизбежные помехи.
Управляющее устройство - техническое устройство, с помощью которого существляется управление Управляющее устройство состоит из: 3 исполнительного устройства (исполнительный механизм(ИМ) + регулирующий орган(РО)) 2. Классификация систем автоматического управления. 1 По признаку наличия обратной связи: 1 Замкнутые – управление по обратной связи «+»: -Высокая точность -Компенсируются не только возмущения извне, но и изменения свойств самого объекта «-»: -невысокое качество переходных процессов в системах с большойинерциальностью 2 Разомкнутые – управление по текущему значению возмущения «+»: -хорошее качество переходных процессов «-»: -Невысокая точность Также существуют комбинированные системы.
2.По количеству входных координат: 1.одномерные
Несвязное управление – несколько управляющих устройств, не имеющих взаимных связей Связные - несколько управляющих устройств, имеющих взаимные связи 3 По виду математических моделей:
2 нелинейные – хотя бы 1 нелинейное звено 4 Меняются ли параметры во времени 1 стационарные 2 нестационарные 5 Непрерывного и дискретного действия 6 Адаптивные могут приспосабливаться к изменениям в условиях работы Неадаптивные Принципы регулирования по отклонению и по возмущению.
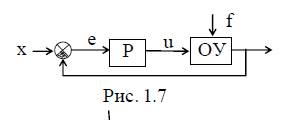
по отклонению: Подавляющее большинство систем построено по принципу обратной связи - регулирования по отклонению (см. рис. 1.7). Элемент называется сумматором. Его выходной сигнал равен сумме входных сигналов. Зачерненный сектор говорит о том, что данный входной сигнал надо брать с противоположным знаком.
по возмущению.
Данные системы могут быть использованы в том случае, если есть возможность измерения возмущающего воздействия (см. рис. 1.8). На схеме обозначен К - усилитель с коэффициентом усиления К.
Статические и динамические характеристики. Статической характеристикойэлемента называется зависимость установившихся значений выходной величины от значения величины на входе системы, т.е.
Статическую характеристику (см. рис. 1.11) часто изображают графически в виде кривой у(х). Статическимназывается элемент, у которого при постоянном входном воздействии с течением времени устанавливается постоянная выходная величина. Например, при подаче на вход нагревателя различных значений напряжения он будет нагреваться до соответствующих этим напряжениям значений температуры. Динамические характеристики. Переход системы от одного установившегося режима к другому при каких-либо входных воздействиях называется переходным процессом. Переходные процессы могут изображаться графически в виде кривой y(t). Например, процесс нагрева сушильного шкафа до установившегося значения может иметь вид, представленный на рисунке 1.12. То есть, переходный процесс характеризует динамические свойства системы, ее поведение. Поскольку входные воздействия могут изменяться во времени, то и переходные характеристики будут каждый раз разные. Для простоты анализа систем входные воздействия приводят к одному из типовых видов 5. Оценка устойчивости по корням характеристического уравнения.
Оценка устойчивости по корням характеристического уравнения
Если корни характеристического уравнения являются вещественными, то САУ будет устойчива, если все они будут отрицательными Если корни комплексные для устойчивости САУ вещественные части корней должны быть отрицательными САУ будет находиться на границе устойчивости, если корни будут чисто мнимые, либо будет нулевой корень Более подробно АППЛЕК2,3,4
9. Показатели качества САУ и способы их определения.
Количественные оценки качества, так называемые прямые показатели качества, определяются по кривой переходного процесса. Рис.4.1. Переходная функция и показатели качества Используются следующие прямые показатели качества: 1) величинаперерегулированияs,
которая характеризует максимальное отклонение регулируемой величины от ее установившегося значения, которое может быть определено в соответствии с теоремой о конечном значении оригинала
2) время переходного процесса или время регулирования tp – наименьшее значение времени, после которого имеет место неравенство
где D - заданная величина, обычно лежащая в пределах D=0.02-0.05; 3) статическая ошибка eсm– величина отклонения установившегося значения регулируемой величины x(¥) от требуемого значенияN
или 4) время установления ty – промежуток времени, по истечении которого регулируемая величина первый раз достигает установившегося значения. Для определения качества системы могут использоваться и другие показатели, соответствующие решаемой задаче, например, число колебаний регулируемой величины за время регулирования, частота и период колебаний и т.д.
Законы регулирования.
Регулирующее возмущение - μ(t) Оптимальное регулирующее воздействие:
Как правило, ограничиваются тремя первыми слагаемыми. Различают: · П-закон, И-закон (наиболее распространены) · ПИ-закон (широкое распространение) · ПИД-закон П-регулятор
ТР – типовой линейный регулятор. ε(t) = U(t)- y(t) - отклонение регулируемой величины от заданного значения. μ(t) - регулирующее возмущение. Для П-регулятора
δст - остаточная неравномерность (статическая ошибка). Если ε(t)→0 , то и μ(t)→0 и никакого регулирования не будет. Остаточная неравномерность у П-регуляторов – их недостаток. Плюсы – быстродействие и простота П-регулятора. Теория автоматического управления (лекции) п.п. all.doc 37 Если Кpувеличивается, то величина статической ошибки уменьшается, но ухудшается устойчивость. И-регулятор
Ти - постоянная интегрирования (настроечный параметр И-регулятора)
Чем больше Δε(t), тем круче пойдет график μ(t), а Ти- const. Чем меньше и Ти , тем больше регулирующее значение. Если Ти →∞, то μ(t)→0. Минусы: действует довольно медленно.
П И П – пропорциональная составляющая И – интегральная составляющая Kp - коэффициент усиления
ПИ-регулятор – параллельное соединение П- и И-звеньев.
ПИД-регулятор. (Пропорционально-интегрально-дифференциальный регулятор)
μ(t) - кривая разгона (не переходная характеристика) Диф. Составляющую не рекомендуется применять в САУ, которые работают в условиях случайных помех. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|



 - характеристическое уравнение
- характеристическое уравнение
 (4.1)
(4.1)
 (4.2)
(4.2) (4.3)
(4.3) где E(s) – изображение ошибки;
где E(s) – изображение ошибки; ε(t)=U-y(t) μ(t)
ε(t)=U-y(t) μ(t)
 – пропорциональное (П) возмущение
– пропорциональное (П) возмущение - интегральное (И) возмущение
- интегральное (И) возмущение - дифференциальное (Д) возмущение
- дифференциальное (Д) возмущение
 ε(t) μ(t)
ε(t) μ(t) - временные частотные характеристики совпадают с П-звеном.
- временные частотные характеристики совпадают с П-звеном. Особенность П-регулятора: регулируемая величина не возвращается к исходному значению.
Особенность П-регулятора: регулируемая величина не возвращается к исходному значению.
 ПИ-регулятор.
ПИ-регулятор.
 - коэффициент при И-составляющей
- коэффициент при И-составляющей
 Структура регулятора:
Структура регулятора:
