|
|
Цифровые фильтры Винера при обработке изображений.Груздев А. А. группа 4676
Обычно изображения, сформированные различными информационными системами, искажаются действием помех. Это затрудняет как их визуальный анализ человеком-оператором, так и автоматическую обработку в ЭВМ. При решении некоторых задач обработки изображений в роли помех могут выступать и те или иные компоненты самого изображения. Например, при анализе космического снимка земной поверхности может стоять задача определения границ между ее отдельными участками - лесом и полем, водой и сушей и т.п. С точки зрения этой задачи отдельные детали изображения внутри разделяемых областей являются помехой. Ослабление действия помех достигается фильтрацией. При фильтрации яркость (сигнал) каждой точки исходного изображения, искаженного помехой, заменяется некоторым другим значением яркости, которое признается в наименьшей степени искаженным помехой. Изображение часто представляет собой двумерную функцию пространственных координат, которая изменяется по этим координатам медленнее (иногда значительно медленнее), чем помеха, также являющаяся двумерной функцией. Это позволяет при оценке полезного сигнала в каждой точке кадра принять во внимание некоторое множество соседних точек, воспользовавшись определенной похожестью сигнала в этих точках. В других случаях, наоборот, признаком полезного сигнала являются резкие перепады яркости. Однако, как правило, частота этих перепадов относительно невелика, так что на значительных промежутках между ними сигнал либо постоянен, либо изменяется медленно. И в этом случае свойства сигнала проявляются при наблюдении его не только в локальной точке, но и при анализе ее окрестности. Понятие окрестности является достаточно условным. Она может быть образована лишь ближайшими по кадру соседями, но могут быть окрестности, содержащие достаточно много и достаточно сильно удаленных точек кадра. В этом последнем случае, конечно, степень влияния далеких и близких точек на решения, принимаемые фильтром в данной точке кадра, будет совершенно различной. Таким образом, идеология фильтрации основывается на рациональном использовании данных как из рабочей точки, так и из ее окрестности. В этом проявляется существенное отличие фильтрации от рассмотренных выше поэлементных процедур: фильтрация не может быть поэлементной процедурой обработки изображений. Задача заключается в том, чтобы найти такую рациональную вычислительную процедуру, которая позволяла бы достигать наилучших результатов. Общепринято при решении этой задачи опираться на использование вероятностных моделей изображения и помехи, а также на применение статистических критериев оптимальности. Причины этого понятны это случайный характер как информационного сигнала, так и помехи и это стремление получить минимальное в среднем отличие результата обработки от идеального сигнала. Многообразие методов и алгоритмов связано с большим разнообразием сюжетов, которые приходится описывать различными математическими моделями. Кроме того, применяются различные критерии оптимальности, что также ведет к разнообразию методов фильтрации. Наконец, даже при совпадении моделей и критериев очень часто из-за математических трудностей не удается найти оптимальную процедуру. Сложность нахождения точных решений порождает различные варианты приближенных методов и процедур.
Общая структура адаптивного фильтра показана на рисунке. Входной дискретный сигнал x(k) обрабатывается дискретным фильтром, в результате чего получается выходной сиг нал y(k). Этот выходной сигнал сравнивается с образцовым сигналом d(k), разность между ними образует сигнал ошибки e(k). Задача адаптивного фильтра — минимизировать ошибку воспроизведения образцового сигнала. С этой целью блок адаптации после обработки каждого отсчета анализирует сигнал ошибки и дополнительные данные, поступающие из фильтра, используя результаты этого анализа для подстройки параметров коэффициентов фильтра.
При синтезе фильтра Винера учитывается информация о спектральной плотности мощности изображения и шума. Поэтому он менее подвержен влиянию помех и нулей передаточной функции искажающей системы. Частотная характеристика фильтра Винера:
где Преобразуем передаточную функцию фильтра Винера:
1. При отсутствии шума фильтр Винера переходит в инверсный фильтр. Следовательно, в области низких частот, где, как правило, отношение сигнал/шум велико передаточные функции этих фильтров практически совпадают. 2. При уменьшении спектральной плотности мощности исходного изображения передаточная функция фильтра Винера стремится к 0. Для изображения это характерно на высоких частотах. 3. На частотах, соответствующих нулям передаточной функции формирующей системы, передаточная функция фильтра Винера также равна 0. Основным недостатком фильтра Винера остается наличие краевых эффектов, проявляющихся в виде осциллирующей помехи (ряби или полос). Ниже приведены одномерные сечения типичных передаточных функций винеровских фильтров (сплошная линия). Здесь же для сравнения приведены сечения передаточных функций инверсных фильтров и, которые обозначены штриховой линией.
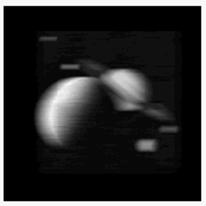
Рассмотрим результаты моделирования винеровского алгоритма восстановления. На рис. 2.а и 4.а приведены результаты искажения изображений «Сатурн» и «Часы» сверткой с гауссовской ФРТ (
Размеры всех наблюдаемых и восстановленных изображений равны 170х170 элементов. Результаты восстановления винеровским фильтром изображения «Сатурн» (рис. 2.б и рис. 3.б) свидетельствуют о том, что фильтр Винера значительно лучше подавляет шумы. Осциллирующая помеха на результатах восстановления изображения «Часы» (рис. 4.б и рис. 5.в) вызвана краевыми эффектами. Ее уровень существенно меньше, чем при инверсной фильтрации. Однако винеровский фильтр лишь частично компенсирует краевые эффекты, которые делают качество восстановления неудовлетворительным.
Таким образом, за счет использования информации о спектральных характеристиках изображения и шума, фильтр Винера обладает относительно высокой помехоустойчивостью и у него отсутствует сингулярность, обусловленная нулями передаточной функции формирующей системы. Основным недостатком фильтра Винера остается наличие краевых эффектов, которые проявляются в виде осциллирующей помехи, маскирующей восстановленное изображение. 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|


 - спектральные плотности мощности периодически продолженных шума, наблюдаемого и исходного изображений,
- спектральные плотности мощности периодически продолженных шума, наблюдаемого и исходного изображений,  - взаимная спектральная плотность мощности исходного и наблюдаемого изображений, * - символ комплексного сопряжения.
- взаимная спектральная плотность мощности исходного и наблюдаемого изображений, * - символ комплексного сопряжения.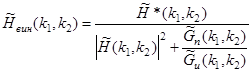


 ) с последующим «обрезанием» краев и добавлением аддитивного дельта-коррелированного шума (
) с последующим «обрезанием» краев и добавлением аддитивного дельта-коррелированного шума (  ). На рис. 3.а и 5.б приведены изображения, полученные в результате смаза (
). На рис. 3.а и 5.б приведены изображения, полученные в результате смаза (  ) изображений «Сатурн» и «Часы» (
) изображений «Сатурн» и «Часы» (