
|
|
Аналитический метод кинематического анализа12 2.7.1. Общие сведения о методе Графический (метод диаграмм) и графоаналитический методы (метод планов скоростей и ускорений) кинематического анализа механизмов имеют недостатки: невысокая точность, определяемая точностью графических построений, и большая трудоёмкость. При иcпользовании графического метода необходимо построить диаграммы перемещений, скоростей и ускорений для каждой исследуемой точки механизма, а при использовании графоаналитического метода – несколько планов скоростей и ускорений механизма, чтобы определить динамику изменения скорости и ускорения интересующих нас точек (т.е. при различных положениях механизма). Эти недостатки отсутствуют в аналитическом методе. Но при этом необходимо составлять достаточно сложные аналитические зависимости (формулы) и иметь возможность решать их с использованием компьютерных техники и технологии, что в последнее время возможно и доступно.
Методы аналитического исследования: метод замкнутых векторных контуров (метод Зиновьева) [4] удобен для кинематического анализа практически всех используемых в технике несложных рычажных механизмов; метод преобразования координат (метод Морошкина) [5] удобен для кинематического анализа многозвенных механизмов типа манипуляторов промышленных роботов. Прежде чем говорить об аналитическом методе, введем некоторые понятия и определения. 2.7.2. Функция положения. Аналог скорости. Аналог ускорения
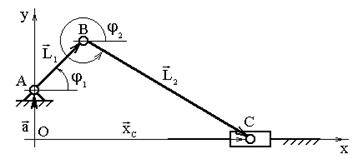
Рис. 2.6. Схема механизма
Функция положения – это аналитическая зависимость положения или координаты К-го звена (jК, ХК или YК ) от положения ведущего звена j1, т.е. jК (j1) или XK(j1) и YK(j1), где jК, XK и YK – координаты, определяющие положение К-го звена (ведомого), а угол j1 – угол, характеризующий положение ведущего звена. Аналог скорости. Угловая скорость К-го звена определяется зависимостью
где Аналог ускорения. Угловая скорость К-го звена определяется зависимостью, получаемой дифференцированием уравнения (2.3) по dt:
При дифференцировании предполагается, что угловая скорость К-го звена wк определяется зависимостью
а угол jк является функцией угла j1:
Величина Введение в кинематический анализ понятий аналогов отделяет геометрические свойства механизма от кинематических. Величину Отношение угловых скоростей в механике называют передаточным отношением Аналог скорости звена также называют первой передаточной функцией. Задачи кинематического анализа и пути их аналитического решения приведены в таблице.
Как следует из приведенной таблицы, для решения задачи о положениях звеньев исследуемого механизма необходимо найти функции положения (jК или ХК и YК ), предварительно составив векторное уравнение замкнутого векторного контура кинематической цепи и уравнения проекций его на координатные оси Х и Y. Из этих уравнений находят функции положения (зависимости положений исследуемого звена от положения ведущего звена). При известном (заданном) законе движения ведущего звена задаются шагом и вычисляют координаты исследуемых звеньев (угловые координаты для вращающегося звена и прямоугольные для звена, совершающего возвратно-поступательное движение). Для решения задачи о скоростях необходимо найти аналоги скоростей исследуемых звеньев и, умножив их на угловую скорость ведущего звена, получить формулы расчета искомых скоростей. Для решения задачи об ускорениях находят также аналоги ускорений звеньев и по формулам, приведенным в таблице, находят величины ускорений. Ниже приводится пример кинематического анализа кривошипно-ползунного механизма аналитическим методом. 2.7.3. Аналитическое исследование кривошипно-ползунного механизма Используем метод замкнутых векторных контуров (рис. 2.7).
Рис. 2.7. Замкнутый векторный контур кривошипно-ползунного механизма
Рассмотрим замкнутый векторный контур OABCO. Соблюдая единообразие отсчёта углов, определяющих положение звеньев, составим векторное уравнение
Спроектируем (2.4) на координатные оси Х и Y:


12 Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2026 stydopedia.ru Все материалы защищены законодательством РФ.
|
 Положение любого звена механизма может определяться параметрами: углом jК относительно какой-либо координатной оси или координатами ХК и YК (рис. 2.6).
Положение любого звена механизма может определяться параметрами: углом jК относительно какой-либо координатной оси или координатами ХК и YК (рис. 2.6). , (2.3)
, (2.3) – аналог скорости К-го звена (первая передаточная функция) для вращающегося звена, величина безразмерная;
– аналог скорости К-го звена (первая передаточная функция) для вращающегося звена, величина безразмерная;  и
и  – аналоги скорости К-го звена, движущегося поступательно, величины безразмерные.
– аналоги скорости К-го звена, движущегося поступательно, величины безразмерные. .
. ,
, .
. – аналог ускорения К-го звена, совершающего вращательное движение, величины
– аналог ускорения К-го звена, совершающего вращательное движение, величины  и
и  – аналоги ускорения К-го звена, двигающегося поступательно, в проекциях на оси X и Y.
– аналоги ускорения К-го звена, двигающегося поступательно, в проекциях на оси X и Y. называют ещё передаточным отношением, так как выражение
называют ещё передаточным отношением, так как выражение  можно преобразовать, умножив и разделив его на величину dt:
можно преобразовать, умножив и разделив его на величину dt: .
. .
.
 Вычисление скоростей
Вычисление скоростей


 Вычисление ускорений
Вычисление ускорений

 . (2.4)
. (2.4)