
|
|
Порядок выполнения работыТЮМЕНСКИЙ ГОСУДАРСТВЕННЫЙ НЕФТЕГАЗОВЫЙ УНИВЕРСИТЕТ ИНСТИТУТ НЕФТИ И ГАЗА Кафедра Кибернетических систем
Методические указания к лабораторной работе № 6 по дисциплине «Теория автоматического управления» на тему «Коррекция статических и динамических свойств САУ в пакете Matlab»
Тюмень 2010 Цель работы:необходимо обеспечить заданную точность САУ; выбрать значения параметров регулятора, обеспечивающих желаемые динамические свойства САУ; подтвердить путем моделирования то, что в результате введения корректирующего устройства (регулятора) САУ приобрела желаемые свойства.
Постановка задачи
При исследовании способов коррекции статических свойств САУ в качестве исходных данных выступают передаточная функция и задающее воздействие вида Путем моделирования в пакете Matlab (Simulink) создается модель объекта регулирования и определяется её статические и динамические характеристики.
1. Проанализируем реакцию системы при подаче на вход сигнала Модель САУ в пакете Matlab выглядит следующим образом:
Рисунок 1 – Модель САУ
Рисунок 2 - Графики
Экспериментальная величина 2. Сравним полученную таким образом экспериментальнуювеличину
Величины
где
Таким образом расчетная величина ошибки и значение, полученное экспериментально, совпадают.
Задача синтеза системы заключается в обеспечении следующих свойств системы:
Как видно, для заданной системы величина статической ошибки не удовлетворяет заданной.
Коррекция статических свойств САУ 1. Применяя способы коррекции статических свойств, обеспечим требуемую статическую ошибку 1) увеличение коэффициента усиления прямоготракта системы K=20
Рисунок 3 - Модель САУ при K=20
Рисунок 4 - Графики
Увеличив коэффициент усиления прямоготракта системы, получили требуемую статическую ошибку εуст=0 при отработке задающего воздействия
2) введение в прямой тракт системы интегрирующих звеньев
Рисунок 5 - Модель САУ при введении интегрирующего звена
При введении интегратора система становится неустойчивой. Для приведения ее к устойчивости установим коэффициент передаточной функции
Рисунок 6 - Графики При введении интегрирующих звеньев система имеет нулевую статическую ошибку при отработке постоянного задающего воздействия 3) охват объекта управления местной неединичной положительной обратной связью
Рисунок 7 - Модель САУ при введении ПОС
Рисунок 8 - Графики
Система имеет нулевую статическую ошибку.
2. При исследовании коррекции динамических свойств САУ в качестве исходных данных выступают передаточная функция
Задающее воздействие 1. Получим путем моделирования графики
Рисунок 9 - Модель САУ с И-регулятором
Рисунок 10 - Графики
2. Определим время регулирования
Коррекция динамических свойств САУ Применяя описанный выше способ коррекции динамических свойств САУ, найти экспериментально значение
Рисунок 13 - Графики Прямые показатели качества: Порядок выполнения работы Лабораторная работа выполняется на персональной ЭВМ в пакетах MatLab. Порядок выполнения работ следующий: 1. По заданным параметрам объекта в пакете Simulink построить модель САУ, определяется её статические и динамические характеристики. 2. Применяя способы коррекции статических свойств (повышение К, ввод интегрирующих звеньев, введение положительной обратной связи), обеспечить требуемую статическую ошибку 3.Рассчитать систему с И-регулятором и исследовать ее в пакете Simulink. 4.Для системы с И-регулятором экспериментально определить
Варианты Передаточная функция САУ имеет вид:

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 неизменяемой части системы вида
неизменяемой части системы вида  (1)
(1)
 получим графики
получим графики  .
.



 .
. с теоретической, вычисленной по формуле (2).
с теоретической, вычисленной по формуле (2). (2)
(2) называются коэффициентами ошибок и определяются по формулам:
называются коэффициентами ошибок и определяются по формулам: (3)
(3) - передаточная функция САУ по ошибке управления, равная
- передаточная функция САУ по ошибке управления, равная (4)
(4) - передаточная функция разомкнутой САУ.
- передаточная функция разомкнутой САУ.



 при
при 
 , % ≤
, % ≤
 системы при отработке задающего воздействия
системы при отработке задающего воздействия 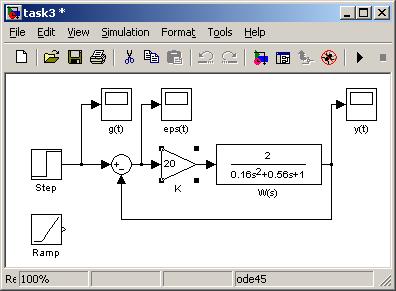






 .
.


 неизменяемой части системы вида (1) и передаточная функция регулятора вида
неизменяемой части системы вида (1) и передаточная функция регулятора вида (5)
(5) .
. и
и  в системе.
в системе.


 и перерегулирование
и перерегулирование 

 %,
%, .
. , обеспечивающее в системе заданные показатели качества (
, обеспечивающее в системе заданные показатели качества (  ,
,  .
.


 ,
, 
 системы.
системы. , % ≤
, % ≤