
|
|
Параметрические датчики реактивного сопротивления12 Основы автоматики и телеметрии Тема 1. Датчики 1.1 Назначение и классификация датчиков, основные параметры.Датчики – обязательные и главнейшие элементы систем автоматического контроля и регулирования. Датчики предназначены для преобразования контролируемых величин в электрические сигналы, как более удобные для последующих преобразований, например, передачи на расстояние, усиления, кодирования и др. К датчикам предъявляются жесткие требования по точности преобразования контролируемой величины, стабильности преобразования при воздействии различных помех и изменений условий их эксплуатации. Немаловажное значение имеют такие параметры, как стоимость, габариты, долговечность службы. Поэтому в различных автоматических системах датчики уникальны. По принципу действия электрические датчики делят на две группы: параметрические и генераторные. Параметрические датчики преобразуют контролируемую величину в параметр электрической цепи: сопротивление, индуктивность, емкость. Для работы параметрических датчиков необходимы вспомогательные источники электроэнергии. К параметрическим датчикам относятся следующие типы датчиков: реостатные, потенциометрические, тензометрические, терморезисторные, емкостные, индуктивные. Генераторные датчики непосредственно преобразуют неэлектрическую контролируемую величину в электрическую. К генераторным датчикам относятся следующие датчики: термоэлектрические, тахогенераторные, индукционные, фотоэлектрические. Генераторные датчики не нуждаются во вспомогательных источниках электроэнергии. По виду контролируемой величины различают следующие датчики: перемещения, давления, температуры, влажности, направления, скорости и др. По виду выходной электрической величины датчиков различают датчики: активного сопротивления, емкости, индуктивности, значения постоянного тока, амплитуды переменного напряжения, частоты следования импульсов и пр. Для любого датчика изменение контролируемой величины должно приводить к изменению его выходной электрической величины. Зависимость между входной и выходной величинами датчика можно представить в графической, табличной и аналитической формах. График зависимости между контролируемой величиной х датчика и его выходной величиной у принято называть характеристикой датчика. Вид характеристики датчика зависит от его конструкции и принципа действия. На рис.1.1. показаны возможные характеристики датчиков: линейная (1), нелинейная (2), реверсивная (3) и нереверсивная (4).
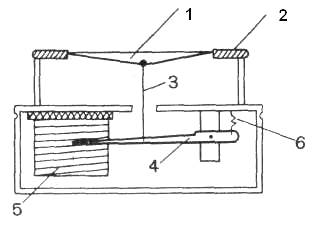
Рис. 1.1 Основным параметром датчика является его чувствительность. Математически она определяется формулой a=Dу/Dх, где Dх – изменение контролируемой величины, Dу – изменение выходной величины датчика. Чувствительность показывает, на сколько единиц изменяется выходная величина датчика при изменении выходной на одну единицу. 1.2. Параметрические датчики активного сопротивления 1.2.1. Реостатные датчики Конструктивно реостатный датчик представляет собойминиатюрный реостатс цилиндрическим или круговым каркасом. Провод, применяемый для намотки, должен иметь небольшое сечение и большое удельное сопротивление. Такие параметры обычно обеспечивают большую чувствительность датчика и его малые габариты. Работа реостатного датчика основана на изменении сопротивления реостата при перемещении ползунка реостата под действием контролируемой величины. Примером реостатного датчика является датчик влажности радиозонда рис. 1.2.
Рис. 1.2 Чувствительным элементом датчика этого влажности является мембрана 1 из органической пленки, натянутая на металлическое кольцо 2. Жёсткий центр мембраны проволочной тягой 3 соединен со стрелкой 4, скользящей по реостату 5. При увеличении относительной влажности воздуха прогиб мембраны увеличивается и стрелка под воздействием возвратной пружины 6 перемещается вниз по контактной поверхности реостата; при уменьшении влажности прогиб мембраны уменьшается и стрелка совершает обратное движение. При перемещении стрелки происходит увеличение или уменьшение электрического сопротивления участка реостата, включенного в измерительную схему радиозонда. Обозначение реостата:
Задача.При поверке реостатного датчика влажности радиозонда были получены следующие данные: при изменении влажности от 10 до 60 % выходное сопротивление датчика изменялось от 4,6 до 7,6 кОм. Определить среднюю чувствительность датчика для указанного диапазона влажности. Решение: По определению чувствительность датчика равна a=Dу/Dх, где Dх – изменение контролируемой величины, Dу – изменение выходной величины датчика. Для данного датчика Dх - изменение влажности, Dу – изменение сопротивления. Вычислим a: a= Ответ: Чувствительность датчика равна 60 Ом/% 1.2.2. Терморезисторы: основные типы, особенности применения терморезисторов разных типов в метеорологических автоматических системах Принцип действия терморезисторов (термометров сопротивления) основан на зависимости электрического сопротивления (проводимости) различных материалов от температуры. Свойством температурной зависимости электросопротивления в той или иной мере обладают все материалы. Металлические терморезисторы - проволочные терморезисторы (в технической документации часто называют «термометрами сопротивления»). Термометры сопротивления, применяемых в метеорологии, изготавливают главным образом из медной и платиновой проволоки диаметром 0,02— 0,1 мм. Металлы (медь, платина), из которых изготовлена проволока, должны быть высокой чистоты, так как даже небольшие примеси существенно изменяют их свойства. Конструкция датчика зависит от его назначения. Так, например, датчик температуры воздуха, если он предназначен для установки на открытом воздухе, должен содержать радиационную защиту и аспиратор; датчик, устанавливаемый в психрометрической будке, может не иметь эти конструктивные элементы; почвенные терморезисторы должны иметь хорошую гидроизоляцию. Температурная зависимость металлических терморезисторов с достаточной точностью определяется уравнением: Rt = Ro(1+Аt), где Rt — сопротивление при температуре t°С; Ro — сопротивление при температуре 0°С; А — температурный коэффициент сопротивления данного металла. В широкой области температур А является постоянной величиной. Полупроводниковые терморезисторы (термисторы), используемые в термометрии, изготовляются обычно из полупроводниковых материалов с большим температурным коэффициентом. К этим материалам относятся, например, окислы урана, марганца, меди, железа, магния, а также их смеси. Сопротивление полупроводников убывает с ростом температуры. Температурная зависимость их сопротивления выражается формулой R = AeВ/Т, где Т — абсолютная температура; А и В — постоянные, характеризующие полупроводник, из которого изготовлен терморезистор; е — основание натуральных логарифмов. На рис. 1.3 показаны характеристики терморезисторов: металлического — (1) и полупроводникового — (2).
Рис.1.3 Основным параметром терморезистора является его чувствительность a, которая показывает на сколько единиц изменяется сопротивление терморезистора при изменении его температуры на один градус: a =DR/Dt. Чувствительность металлических терморезисторов может быть вычислена и по формуле a =RoA. Как видно из этой формулы, чувствительность металлического терморезистора не зависит от температуры. Полупроводниковые терморезисторы более чувствительны, чем металлические, поэтому применение их в некоторых случаях оказывается целесообразным. Однако массовое их использование встречает некоторые затруднения. В частности, из-за нелинейного характера зависимости термосопротивления от температуры полупроводниковый термометр сопротивления имеет переменную чувствительность по шкале температуры. Полупроводниковые терморезисторы даже одной партии изготовления имеют разбросы по номиналу Ro и температурному коэффициенту сопротивления В. Массовый подбор терморезисторов с одинаковыми характеристиками затруднителен. Для точных измерений температуры (с погрешностью менее 0,1°С) к каждому экземпляру терморезистора приходится рассчитывать и изготовлять подгоночные элементы схемы. Характеристики полупроводниковых терморезисторов меняются во времени больше, чем металлических. Поэтому в настоящее время термометры с полупроводниковыми терморезисторами применяют для массовых измерений, не требующих высокой точности — порядка 1,0° С (в радиозондах, при агрофизических измерениях и некоторых других). В стационарной наземной метеорологической аппаратуре в качестве датчиков температуры используются преимущественно металлические терморезисторы, которые включаются в измерительную схему (например, мостовую) как один из ее элементов. На рис. 1.4 представлена схема измерения температуры на основе неравновесного моста. В плечо 3-4 включен термометр сопротивления Rt – датчик температуры, соединенный с измерительной схемой линией связи с сопротивлением Rл.
Рис.1.4 В другие плечи измерительного моста включены высокостабильные резисторы: R1, R2, R3. Их сопротивления подбирают таким образом, чтобы при 0°С мост был уравновешен, в этом случае ток в цепи индикатора моста равен нулю. При изменении температуры мост разбалансируется и в цепи индикатора появляется ток, величина которого зависит от измеряемой температуры. Поэтому шкала индикатора проградуирована в °С. Контактные датчики Контактными называют датчики, в которых под воздействием контролируемой величины происходит замыкание или размыкание электрических контактов. Контактные датчики широко используются в автоматических измерительных системах и в системах автоматической сигнализации. Каждый контактный датчик уникален по конструкции и принципу действия. Рассмотрим несколько примеров контактных датчиков, используемых в автоматических радиометеорологических станциях. Датчик скорости ветра КРАМС (рис. 1.5) включает в себя: постоянный магнит 1, связанный с воздушным винтом 2 и геркон 3. Магнит и геркон находятся внутри вертикальной стойки. При каждом обороте магнита контакты геркона дважды замыкаются. Частота замыканий контактов геркона пропорциональна скорости ветра. В измерительной схеме, в которую включен датчик, происходит подсчет числа импульсов за двухминутный интервал времени и преобразование их числа в значение скорости ветра.
Рис. 1.5
Датчик количества осадков станции М-107 (рис. 1.6)
Рис. 1.6 Осадки через воронку попадают в мерный сосуд 1 (сосуд разделен перегородкой на две равные камеры). Сосуд связан с осью 2, вместе с которой он может совершать качания в вертикальной плоскости между двумя крайними положениями, определяемыми ограничительными упорами. Центр тяжести сосуда 1 находится выше оси его качания — его положение неустойчивое, — и поэтому он может находиться только в одном из двух крайних положений. Если сосуд слегка вывести из одного крайнего положения, он резко перейдет (качнется) в другое крайнее положение. Переход сосуда из одного положения в другое сопровождается посылкой импульса электрического тока в измерительную цепь. Импульс формируется с помощью постоянного магнита 3, укрепленного на оси качания сосуда, и неподвижно закрепленного геркона 4. При каждом качании сосуда происходит одно кратковременное замыкание геркона. Когда мерный сосуд находится в положении крайнего отклонения (любом), под сливной воронкой всегда находится одна из его камер, которая оказывается выше второй. При выпадении осадков через сливную воронку заполняется расположенная под воронкой камера мерного сосуда. Как только они заполнится определенным количеством воды, сосуд выводится из равновесия, занимает второе крайнее положение и под воронкой оказывается другая (пустая) камера мерного сосуда. Вода из первой камеры сливается через водосливной цилиндр на землю. При заполнении второй камеры процесс повторяется. С помощью упоров регулируют положение сосуда так, чтобы равновесие его нарушалось при заполнении его верхней камеры определенным объемом воды, равным 25 см3. Это соответствует 0,05 мм осадков. Количество выпавших осадков равно произведению 0,05 мм и числа качаний мерного сосуда. Пересчет выходных импульсов датчика в количество осадков осуществляется с помощью измерительной схемы.
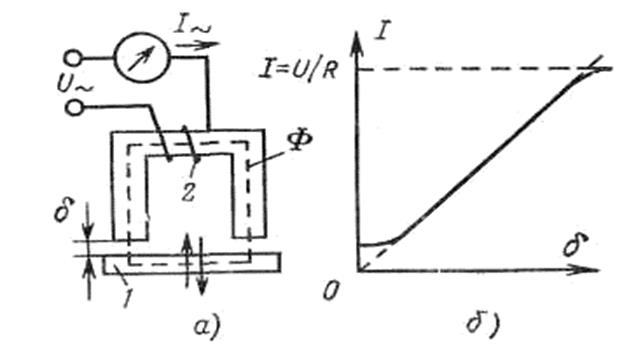
Параметрические датчики реактивного сопротивления Индуктивные датчики Индуктивные датчики широко распространены в промышленности, так как они просты, надежны, бесконтактны, у них сравнительно большая отдаваемая мощность, могут работать на переменном токе промышленной частоты. Они используются в основном для измерения угловых и линейных перемещений, а также для измерения силы давления. Индуктивные датчики разделяются на датчики с подвижным якорем, подвижным сердечником и поворотным якорем. На рис. 1.7 показана конструкция индуктивного датчика с подвижным якорем (а) и его характеристика (б) — зависимость тока I, протекающего в катушке, от воздушного зазора d между сердечником и якорем.
Рис. 1.7 Если перемещать якорь 1 датчика, воздушный зазор d будет изменяться, а следовательно, будет изменяться и индуктивность катушки 2. Индуктивность катушки обратно пропорциональна воздушному зазору, т. е. при больших зазорах индуктивность имеет малое значение, а при малых — большое. Ток в катушке датчика определяется по формуле
где U – напряжение питания, Z – полное сопротивление катушки, R – активное сопротивление катушки, XL = 2pfL – индуктивное сопротивление катушки, f – частота питающего напряжения, L – индуктивность катушки, зависящая от воздушного зазора d. Как видно из формулы, при постоянных U, R n f ток катушки зависит только от индуктивности (а следовательно, от воздушного зазора d). Таким образом, ток в катушке датчика пропорционален воздушному зазору d: I= kd где k — коэффициент пропорциональности или чувствительности датчика по току. Реальная характеристика индуктивного датчика отличается от идеальной (показана пунктиром на рис. 1.7, б) наличием некоторой нелинейности. Большинство индуктивных датчиков предназначено для работы при относительно низких частотах напряжений питающей сети (до 5000 Гц), так как при более высоких частотах в значительной степени растут потери в стали на перемагничивание и реактивное сопротивление обмотки. Индуктивные датчики использовались в автоматических метеорологических станциях в схемах измерения атмосферного давления.
Емкостные датчики Емкостный датчик представляет собой плоский конденсатор с изменяемой емкостью. Емкостные датчики, как и индуктивные, работают на переменном токе, только в отличие от индуктивных в большинстве случаев работают на частотах выше 1 кГц.
С= где e —диэлектрическая проницаемость; S — площадь перекрывания пластин; d — расстояние между пластинами. Из приведенной формулы видно, что емкость конденсатора может быть изменена за счет изменения расстояния между пластинами б, площади пластин S или диэлектрической проницаемости среды е. На рис. 1.8 показаны разновидности конструкций емкостных датчиков.
Рис. 1.8 К преимуществам емкостных датчиков относятся большая чувствительность. Однако эти датчики получили небольшое распространение в наземной обслуживаемой аппаратуре, так как имеют серьезные недостатки. В частности, они непригодны для работы, на низких частотах и требуют специального высокочастотного генератора. Но эти условия выполнимы в радиозондах и метеорологических ракетах, где высокочастотные генераторы используются в радиопередатчиках. Генераторные датчики 1.3.1.Тахогенераторные датчики Тахогенераторные датчики (тахогенераторы) представляют собой электрические машины малой мощности, работающие в режиме генератора. Выходной величиной тахогененраторов является электрическое напряжение, являющееся функцией угловой скорости вращения его вала. В зависимости от конструкции различают тахогенераторы постоянного и переменного тока. В автоматических метеорологических станциях чаще используются тахогенераторы переменного тока как более надежные в работе. На рис 1.9 показано устройство синхронного тахогенератора переменного тока.
Рис 1.9 Синхронный тахогенератор имеет ротор 1, представляющий собой постоянный магнит с несколькими полюсами, который может вращаться относительно неподвижной обмотки возбуждения 2, закрепленной на статоре. При вращении ротора в обмотке статора возбуждается синусоидальная ЭДС. Амплитуда и частота этой ЭДС пропорциональны частоте вращения ротора. На рис. 1.10 представлена схема измерения скорости ветра в станции М-49. В этой схеме используется синхронный тахогенератор с кольцевым шестиполюсным постоянным магнитом на роторе. Ротор тахогенератора 1 через коническую пару зубчатых колес связан с вертушкой 3 в виде пропеллера. Под действием воздушного потока ротор тахогенератора вращается и в его обмотке возбуждения 2 наводится переменное напряжение, пропорциональное скорости воздушного потока. Напряжение с обмотки подается на мостиковую выпрямительную схему 4, откуда через RC-фильтр поступает на индикатор (магнитоэлектрический микроамперметр) 5. Шкала прибора проградуирована в м/с. Диапазон измерения скорости ветра в этой схеме – 1,5 – 60 м/с.
Рис. 1.10 
12 Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|


 =
=  = 0,06 (кОм/%)= 60 Ом/%
= 0,06 (кОм/%)= 60 Ом/%



 ?
? Принцип действия их основан на изменении емкости конденсатора при перемещении обкладок конденсатора относительно друг друга. Это легко понять, если вспомнить формулу емкости плоского конденсатора
Принцип действия их основан на изменении емкости конденсатора при перемещении обкладок конденсатора относительно друг друга. Это легко понять, если вспомнить формулу емкости плоского конденсатора


