|
|
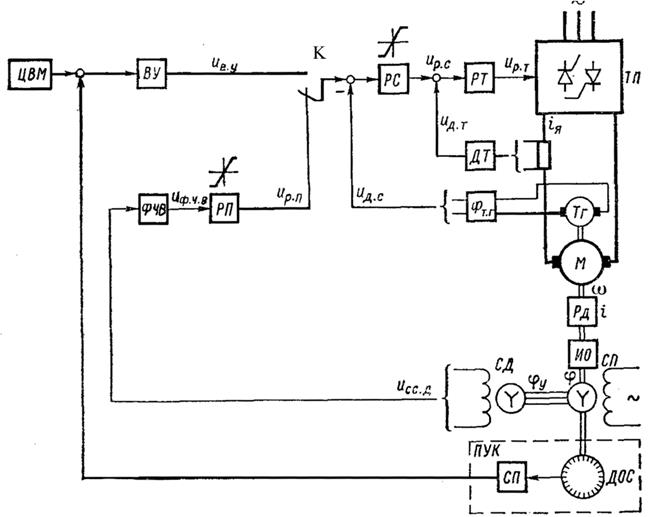
Вопрос №2: Особенности построения систем управления положением механизма с аналоговым и цифровым контурами положенияСистемы регулирования положения - класс систем с чрезвычайно широким диапазоном назначений. Они используются в промышленных установках и роботах в качестве систем наведения антенн, оптических телескопов, и радиотелескопов и т. д. Мощность исполнительных двигателей составляет от единиц и десятков ватт до десятков и сотен киловатт, их питание осуществляется от электромашинных, тиристорных преобразователей или транзисторных усилителей мощности. Контроль положения - с помощью датчиков, которые в аналоговой или дискретной форме дают информацию о перемещении рабочего органа механизма на протяжении всего пути. В качестве датчиков используются сельсины, вращающиеся трансформаторы, индуктосины, импульсные и цифровые датчики и др. В большинстве случаев мощные промышленные системы управления положением строятся сегодня по принципам подчиненного регулирования при питании двигателей постоянного тока от ТП. При этом внутренние контуры тока и скорости выполняются обычным образом и к ним добавляется цифровой или аналоговый контур регулирования положения. На рис. 11-2-1 показана схема системы управления положением, в которой при переключении переключателя К может быть осуществлено замыкание аналогового или цифрового внешнего контура. Рисунок 11-2-1
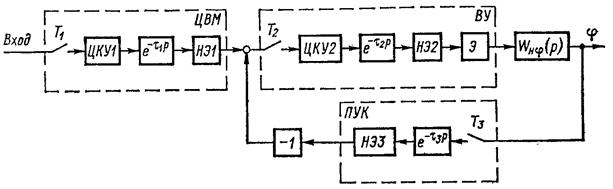
Аналоговый контур. В первом случае измерительным элементом являются сельсины, работающие в трансформаторном режиме. Сельсин-приемник (СП) связан с исполнительным органом (ИО), который приводится двигателем М через редуктор Рд. Подача на вход управляющего воздействия, которым является поворот сельсина-датчика (СД) на некоторый угол φу относительно согласованного с сельсином-приемником положения, вызывает появление на его однофазной обмотке напряжения переменного тока uсс.д значение которого определяется значением угла рассогласования, а фаза - направлением поворота относительно согласованного положения, т. е. знаком угла. С помощью фазочувствительного выпрямителя (ФВЧ) это напряжение выпрямляется, причем полярность напряжения uф.ч.в определяется знаком рассогласования. Напряжение, появившееся на входе регулятора положения (РП) воздействует на вход контура скорости и двигатель вращается, отрабатывая рассогласование до тех пор, пока не установится равенство φ=φу . В цифровом контуре положения измерительным элементом является дискретный датчик обратной связи (ДОС). С помощью схемы преобразования (СП) с него снимается сигнал в двоичном коде, датчик вместе со схемой преобразования представляет собой преобразователь «угол — код» (ПУК) или преобразователь «линейное перемещение — код». Вычислительное устройство (ВУ), сравнивая полученные в цифровой форме предписанное значение (задание) и истинное значение, определяет код ошибки, а также вырабатывает в цифровой форме корректирующий сигнал (например, интеграл или производную от ошибки) и преобразует результат вычислений в напряжение, действующее на вход контура скорости. По принципу действия ЦВМ выполняет необходимые математические операции в течение определенного времени, называемого периодом дискретности. Если на ЦВМ возложено решение большого круга сложных задач по управлению всем технологическим процессом и рассматриваемая система управления положением является одной из многих локальных систем, то период дискретности не может быть сделан достаточно малым и использование ЦВМ в контуре регулирования оказывается нерациональным. Тогда система управления положением выполняется как автономная. Задачей ЦВМ в этом случае является выработка предписанного значения перемещения в цифровом виде. В цифровом контуре регулирования значение величины, полученное в результате математических действий, выполненных в течение данного периода дискретности, обычно остается неизменным и в последующий период дискретности. Таким образом происходит процесс квантования по времени, представляющий собой процесс превращения непрерывной функции времени в ступенчатую. Кроме того, цифровое представление величин характеризуется тем, что возможна фиксация не любых значений величины, а ряда значений, отличающихся друг от друга на единицу младшего разряда. Так происходит квантование по уровню. Сочетание этих особенностей приводит к тому, что цифровой контур представляет собой нелинейную дискретную систему. В общем случае структуру цифровой системы регулирования положения можно представить в виде рис. 11-2-2
Цифровые корректирующие устройства ЦКУ1 и ЦКУ2 обрабатывают информацию соответственно в ЦВМ н ВУ, реализуя принятые законы управления. Звенья постоянного запаздывания е-τ1p, е-τ2p, е-τ3p учитывают время, затрачиваемое ЦВМ, ВУ и ПУК на обработку информации. Эффект квантования по времени учитывается введением импульсных элементов (ключи), имеющих периоды дискретности Т1, Т2, T3. Эффект квантования по уровню отображается нелинейными элементами НЭ1, НЭ2, НЭЗ, имеющими релейную характеристику с определённым числом ступеней. Экстраполятор Э преобразует дискретный сигнал в непрерывный. Выходное напряжение экстраполятора воздействует на аналоговую неизменяемую часть контура положения с передаточной функцией Wнф(р). Билет №12 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|