|
|
Вопрос №1: Векторное частотное управление АД. Функциональная схема, характеристики.При скалярном управлении магнитный поток двигателя в переходном процессе не остается постоянным, поэтому в переходном процессе возможны колебания электромагнитного момента и скорости. Существуют механизмы с высокими требованиями к динамике (станки с ЧПУ, следящие системы), где необходимо обеспечивать максимальное быстродействие без колебаний скорости. Это возможно выполнить, если поддерживать точно на заданном уровне магнитный поток и электромагнитный момент в переходном процессе двигателя. Достичь этого можно только при векторном управлении. Векторное управление – это частотное управление, где в качестве управляющих воздействий используются пространственные векторы электромагнитных величин. Будем рассматривать систему координат Х-Y, ориентированную по потокосцеплению ротора Ψ2(рис. 1). Система вращается со скорость w0эл.
Из рис 1 видно, что при таком расположении координат Х-Y
Составляющая i1X вектора тока статора Первая задача векторного управления состоит в том, чтобы процесс, когда изменяется частота, с помощью системы управления поддерживать показанное на рис.1 расположение векторов Запишем уравнение динамической механической характеристики (ДМХ) АД в осях Х-Y, где p – не оператор Лапласа, p=d/dt:
Выразим потокосцепления через токи:
Из этих выражений выразим ток ротора:
С учетом (1) и (2) запишем уравнение ДМХ АД в системе координат Х-Y:
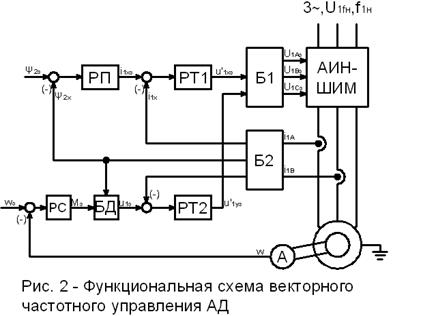
Анализ (3): 1) Статическая характеристика может быть получена при Ψ2Х= Ψ2max, приняв р=0; 2) Из 3-го уравнения системы (3) следует, что Ψ2Х пропорционально i1Х; 3) Из 5-го уравнения системы (3) следует, что при Ψ2Х=const: M=KM·i1Y. Функциональная схема векторного управления АД представлена на рисунке 2. Специальные датчики: А – датчик скорости; БД – блок деления, для компенсации произведения в выражении момента. Расчет блока Б2
Функции блока Б1
Механические характеристики при векторном управлении АД:
Рисунок 3 – механические характеристики АД при векторном управлении При изменении частоты питающего напряжения, момент критический Мк и жесткость механической характеристики остаются неизменными.
Вопрос №2: Принципы построения систем автоматического управления, инвариантных к параметрическим и координатным возмущениям. Суть вопроса сводится к выбору такого управления u , при котором выходное значение y объекта управления совпадало бы с задающим значением s или их разница лежала бы в допустимых пределах при изменении внешнего возмущающего воздействия f и a. Возмущение f называется координатным, а возмущение a – параметрическим. Под влиянием внешних возмущений, информации о которых часто недостаточно, взаимосвязь между входом и выходом объекта становится неоднозначной и неопределенной, что сильно затрудняет решение задачи. Координатное возмущение есть неизвестная величина со стороны нагрузки на объект управления, которая проявляется в виде неконтролируемых произвольных изменений технологических параметров и по характеру изменения во времени может быть импульсной и медленноменяющейся. Параметрическое возмущение есть неизвестная величина из некоторого ограниченного множества, в результате действия которой происходит медленное изменение параметров объекта управления. Следует отметить принципиальное различие между этими двумя типами возмущений. Рассмотрим случай, когда на объект управления Wоб(p) со входным сигналом u и выходом y действуют оба типа возмущающих воздействий. Тогда выходная координата объекта примет вид: y=Wоб(p,a)g=Wоб(p,a)(f +u)=Wоб(p,a)f +Wоб(p,a)u Координатное возмущение f вносит аддитивный и независимый от входа u вклад в реакцию объекта, равный Wоб(p,a)f . Параметрическое же возмущение a изменяет только вид или параметры Wоб(p,a) и не имеет независимого от u и f влияния на выход объекта. Инвариантная – система с регулированием по возмущающему воздействию. Система не чувствительна к параметрическим и координатным возмущениям. Если идут возмущения, то мы их контролируем и заводим через регуляторы на вход системы, регулятор отрабатывает и система возвращается в исходное состояние. Контролируемые параметры: выход регулятора тока, регулятора скорости, СИФУ. Мы контролируем эти параметры и заводим на вход регулятора.
ИПУ – измерительно-преобразовательное устройство. На регулятор через устройство компенсации К, обеспечивающее измерение возмущений и придание определенных динамических свойств компенсационным каналам, подаются сигналы, зависящие от возмущающих воздействий. Теоретически при правильном выборе передаточной функции компенсационных каналов и точном измерении воздействий можно говорить о полной инвариантности системы к возмущениям, т.е. о полной компенсации влияния возмущений на силовую часть за счет воздействия со стороны регулятора. Билет №4 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|

 и
и  , т.е. электромагнитный момент определяется произведением
, т.е. электромагнитный момент определяется произведением  , и если эти величины будут постоянными, то постоянным будет и электромагнитный момент:
, и если эти величины будут постоянными, то постоянным будет и электромагнитный момент:
 направлена вдоль оси Х, т.е. вдоль вектора
направлена вдоль оси Х, т.е. вдоль вектора  , и является намагничивающей составляющей для потока ротора.
, и является намагничивающей составляющей для потока ротора. (1)
(1)
 (2)
(2) 
 (3)
(3)