
|
|
Этап I. Кинематический анализ механизма.Определение кинематических характеристик Механизм состоит из трех звеньев. Ведущим является маховик 1, к которому приложен вращающий момент Скорость поступательно движущейся кулисы находим по теореме сложения скоростей, рассматривая движение кулисного камня как сложное. Переносная скорость т. Так как
Откуда Скорость центра катка находим из условия пропорциональности скоростей его точек расстояниям до мгновенного центра скоростей
Откуда
Угловую скорость катка находим как отношение скорости его центра к расстоянию до мгновенного цента скоростей
(положительное направление отсчета угла поворота катка – против хода часовой стрелки). Ускорение поступательно движущейся кулисы, ускорение центра катка, а также угловое ускорение катка находим дифференцированием, соответственно, скорости поступательно движущейся кулисы, скорости центра катка, а также угловой скорости катка. Откуда
Укажем векторы
Рис.2
Запись уравнений геометрических связей Как и раньше, начало координат помещаем в точку Уравнения связей:
Используя выражения для
В результате интегрирования этих дифференциальных уравнений получим
Этап II. Угловая скорость и угловое ускорение маховика. Определение кинетической энергии системы Кинетическую энергию механизма находим как сумму кинетических энергий его звеньев
Кинетическая энергия вращающегося маховика:
Кинетическая энергия поступательно движущейся кулисы:
Кинетическая энергия катка, совершающего плоское движение:
Кинетическая энергия системы:
После тождественных преобразований:
где –приведенный к ведущему звену момент инерции. Определение производной кинетической энергии по времени Производную кинетической энергии по времени находим по правилу вычисления производной произведения и производной сложной функции
Здесь
2.3. Определение элементарной работы, мощности внешних сил. Определение работы внешних сил на конечном перемещении(механизм в горизонтальной плоскости). В случае, когда механизм расположен в горизонтальной плоскости работу совершает только вращающий момент
Мощность
Работа при повороте маховика на угол
2.4. Определение угловой скорости маховика при его повороте на угол φ*
Для определения угловой скорости маховика применяем теорему об изменении кинетической энергии в конечной форме, полагая, что механизм в начальный момент находился в покое.
Подстановка в это равенство найденных выражений (1) и (4) дает
Тогда
2.5. Определение углового ускорения маховика при его повороте на угол φ* Воспользуемся теоремой об изменении кинетической энергией в дифференциальной форме
Подставляя в это уравнение найденные выше значения (2) и (3), находим
Откуда
и
Дифференциальное уравнение второго порядка
описывает движение кулисного механизма. Оно может быть проинтегрировано только численно, а также использовано для нахождения углового ускорения маховика в произвольном его положении. Определим угловое ускорение маховика при угле его поворота

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 со стороны электродвигателя. От маховика посредством кулисы 2 движение передается ведомому звену 3 – катку. Маховик совершает вращательное движение, кулиса – поступательное, каток – плоское. Начало координат помещаем в точку
со стороны электродвигателя. От маховика посредством кулисы 2 движение передается ведомому звену 3 – катку. Маховик совершает вращательное движение, кулиса – поступательное, каток – плоское. Начало координат помещаем в точку  , ось
, ось  направляем вправо, ось
направляем вправо, ось  – вверх (рис. 2).
– вверх (рис. 2). определяет скорость кулисы в ее поступательном движении.
определяет скорость кулисы в ее поступательном движении. , то
, то  .
. .
. .
. .
.
 ,
, ,
, .
. ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  , и
, и  в положении механизма, изображенном в условии задачи, когда
в положении механизма, изображенном в условии задачи, когда  . Так как динамический расчет еще не проведен и информация об угловой скорости маховика и его угловом ускорении отсутствует, то изображение носит иллюстративный характер. В данном положении и кулиса и каток движутся замедлено. Каток приближается к его крайнему нижнему положению.
. Так как динамический расчет еще не проведен и информация об угловой скорости маховика и его угловом ускорении отсутствует, то изображение носит иллюстративный характер. В данном положении и кулиса и каток движутся замедлено. Каток приближается к его крайнему нижнему положению.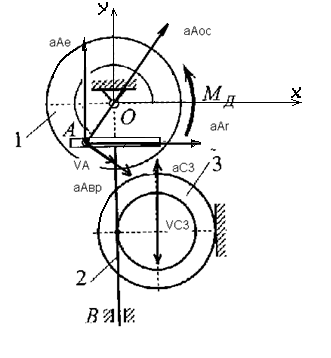
 – вверх.
– вверх. ,
,  ,
,  ,
,  ,
,  .
. и
и  , приходим к равенствам
, приходим к равенствам и
и  .
. ,
,  .
. .
. ,
, –момент инерции маховика относительно оси вращения.
–момент инерции маховика относительно оси вращения. ,
, ,
, –момент инерции катка относительно оси, проходящей через его центр масс.
–момент инерции катка относительно оси, проходящей через его центр масс. .
. , (1)
, (1) ,
,  .
. . (2)
. (2) ,
,  .
. . Элементарная работа при этом определяется равенством
. Элементарная работа при этом определяется равенством .
. , (3)
, (3)
 . (4)
. (4) ,
,  ,
,  .
. .
. .
. ,
,  .
. .
.

 (5)
(5) .
. .
.