
|
|
Допустим, что эти величины связаны между собой зависимостью, близкой к
где ω = |ωx| = |ω| – модуль псевдовектора угловой скорости ω; ω0 – константа размерности частоты. Тогда при Вариант 2. Пусть силы Fп и Fс отклоняются от прямой ПС следующим образом. Если скорость относительного движения причины П и следствия С направлена вдоль прямой ПС или равна нулю, то отклонение отсутствует. Если относительная скорость точек П и С направлена под углом к прямой ПС, то отклонение сил происходит в плоскости, которая перпендикулярна другой плоскости, проходящей через вектор относительной скорости и прямую ПС. При этом силы Fп и Fс, как ранее мы условились считать, отклоняются от прямой ПС в противоположные стороны и на одинаковый угол (рис. 3.3,а).
Рис. 3.3. Еще одно возможное воздействие времени на причинную связь: а – отклонение сил Fп и Fс от прямой ПС в плоскости β на угол vc – скорость движения точки-следствия С относительно точки-причины П; vп – скорость точки П относительно точки С (vп = –vс); Fс1, Fс2, Fп1, Fп2 – составляющие сил действия Fс и противодействия Fп, направленные вдоль прямой ПС и перпендикулярно к ней; α – плоскость, проходящая через вектор относительной скорости vc и прямую ПС; β – плоскость, перпендикулярная плоскости α и проходящая через прямую ПС; iс, iп – орты, лежащие на прямой ПС и направленные соответственно от точки П к точке С и от С к П (iп = –iс).
Конкретное из двух возможных направлений отклонения силы в указанной плоскости определим для каждого элемента причинно-следственного звена таким образом. Возьмем три вектора: вектор скорости, с которой рассматриваемый элемент движется относительно другого элемента; составляющую действующей на него силы, направленную вдоль прямой ПС; составляющую той же силы, направленную перпендикулярно прямой ПС. Пронумеруем эти векторы в перечисленном порядке. Примем, что отклонение силы от прямой ПС происходит в такую сторону, при которой указанная упорядоченная тройка векторов образует для точки-причины левый, а для точки-следствия правый репер. Будем считать, что угол отклонения силы Более детально данный вариант воздействия времени опишем для случая малого угла
(рис. 3.3,б). Будем считать, что добавочные силы описываются выражениями
где силы действия Fс и противодействия Fп направлены вдоль прямой ПС; vс – скорость точки-следствия С относительно точки-причины П; vп – скорость точки П относительно точки С (vп = –vс); c2 – псевдоскалярный параметр размерности скорости, c2 > 0 в правой системе координат (псевдоскалярность параметра c2 нужна для компенсации псевдовекторногохарактера векторного произведения). Из Fп = –Fс, vп = –vс следует Кп = –Кс, как это и должно быть. В связи с тем, что мы рассматриваем случай
поэтому должно выполняться условие |vс|sin( Вариант 3. Допустим, что силы Fп и Fс отклоняются от прямой ПС таким же образом, как и в варианте 2, за одним исключением: направление отклонения определяется иной упорядоченной тройкой векторов. А именно, возьмем следующие три вектора: вектор относительной скорости рассматриваемого элемента причинно-следственного звена; единичный вектор, лежащий на прямой ПС и направленный от другого элемента в сторону данного; составляющую действующей на данный элемент силы, направленную перпендикулярно прямой ПС. (В варианте 2 вместо второго вектора бралась составляющая силы, направленная вдоль прямой ПС.) Примем, что отклонение силы от прямой ПС происходит в такую сторону, что эти три вектора, занумерованные в указанном порядке, образуют для точки-причины левый, а для точки-следствия правый репер. Угол отклонения силы Для малого угла
где F = |Fс| = |Fп|; iс, iп — единичные векторы, лежащие на прямой ПС; iс направлен от точки П к точке C, iп направлен от точки С к точке П (iп = –iс); остальные обозначения те же, что и в формулах (3.6), (3.7) (см. рис. 3.3,6). Здесь, как и в варианте 2, полагаем выполненным условие |vс| << |c2|. Рассмотрим один частный случай. Пусть в некоторой инерциальной системе координат точка-причина П покоится, а точка-следствие С равномерно обращается вокруг нее по окружности с центром в точке П. В этом случае относительная скорость vс перпендикулярна к прямой ПС и направлена по касательной к окружности, поэтому формулы (3.9), (3.10) могут быть преобразованы к виду
где v = |vс| = |vп|; l – единичный псевдовектор, перпендикулярный векторам vс и iс и направленный в ту же сторону, что и псевдовектор vс Отметим, что различие между вариантами 2 и 3 наиболее заметно проявляется в случае знакопеременного взаимодействия между причиной и следствием: при изменении знаков сил Fс и Fп добавочные силы Кс и Кп в варианте 2 тоже меняют знаки, а в варианте 3 остаются без изменений. Отметим также, что, строго говоря, появление добавочных сил определенной величины и отклонение «классических» сил на угол, определяемый зависимостями (3.5), представляют собой не тождественные результаты. Однако при добавочных силах, существенно меньших (по модулю) «классических» сил, эти результаты различаются на малую второго порядка по углу отклонения, и при достигнутой в экспериментах Н. А. Козырева точности измерений они не различимы. Существенным свойством добавочных сил Кс и Кп, введенных в вариантах 2 и 3, является то, что они не производят в сумме работы над причинно-следственным звеном. В самом деле, суммарное приращение работы этих сил ∆A за малый промежуток времени ∆t составляет
где uс, uп – скорости следствия и причины относительно рассматриваемой инерциальной системы координат. Учитывая, что Кп = –Кс и что следствие движется относительно причины со скоростью vс = uс – uп, находим из равенства (3.13):
А так как согласно формулам (3.6), (3.9) добавочная сила Кс перпендикулярна вектору скорости vс, то отсюда и получаем, что ΔA = 0. Данный результат имеет принципиальное значение. Он означает, что для осуществления воздействия на причинно-следственное звено, описываемое вариантами 2 и 3, не требуется производить дополнительных затрат работы. Не изменяется при таком воздействии и энергия системы. Отметим также, что из равенства нулю главного вектора добавочных сил (Кс + Кп = 0) следует неизменность суммарного импульса системы. Вместе с тем, рассматриваемое воздействие может изменять момент количества движения системы и траектории элементов, составляющих причинно-следственное звено. Возможно, что именно к такому варианту воздействия времени на причинную связь склонялся по мере развития своих представлений Н. А. Козырев. Если в первых публикациях по причинной механике ученый пишет о том, что время может пополнять энергию системы, то в более поздних работах он утверждает, что время через свои физические свойства повышает организованность вещества, препятствуя (в какой-то степени) возрастанию энтропии в системе, то есть время является источником негэнтропии в нашем Мире.
Итак, мы рассмотрели три возможных варианта отклонения векторов сил от прямой ПС, соединяющей взаимодействующие точки. В рамках классической механики такое отклонение не может быть объяснено свойствами самого причинно-следственного звена. Дело в том, что в классической механике материальные точки не наделяются внутренней структурой, поэтому их симметрия совпадает с симметрией геометрической точки. Из этого следует, что среди элементов симметрии причинно-следственного звена имеются ось вращения бесконечного порядка, проходящая через обе образующие его точки, и плоскости зеркальной симметрии, содержащие прямую ПС. При наличии таких элементов симметрии внутренние причины не способны привести к отклонению силы взаимодействия от прямой ПС в каком-либо определенном направлении (как это имеет место в вариантах 2 и 3) или же к ее отклонению и вращению в какую-нибудь определенную сторону (как в варианте 1). Поэтому с позиции классической механики рассматриваемое отклонение может быть вызвано только причиной, внешней по отношению к причинно-следственному звену. Три рассмотренные варианта воздействия времени на причинную связь, разумеется, не единственно возможные. Однако определить, какой из этих или других возможных вариантов верно отражает реальную действительность, можно только на основании специальных опытов. Из содержания настоящего раздела видно, что принципиальная возможность отклонения сил от прямой, соединяющей взаимодействующие точки, фактически содержится уже в самй классической механике (в ней не имеется только физической причины, которая обусловила бы отклонение сил в определенном направлении). Поэтому причинную механику Козырева можно рассматривать как естественное развитие классической механики Ньютона. 4. О неточности задания сил в классической механике Согласно исходным постулатам причинной механики причина и следствие всегда разделены сколь угодно малыми, но не равными нулю пространственным δx и временнм δt различиями (причем временное различие имеет определенный знак в связи с тем, что следствие наступает позже причины). Отношение данных величин названо Н. А. Козыревым ходом времени и обозначено через с2:
Классическая механика тоже содержит положение о пространственном неналожении причины и следствия. Оно вытекает из III закона Ньютона, в соответствии с которым сила действия и сила противодействия приложены к разным телам, что обязательно означает наличие ненулевого пространственного расстояния между точками приложения сил. Вместе с тем, классическая механика не учитывает существование временнго различия между причиной и следствием. Это видно также из III закона Ньютона, согласно которому силы, приложенные к причине и следствию, действуют в один и тот же момент времени. Таким образом, можно сказать, что классическая механика является вырожденным случаем причинной механики, отвечающим следующим значениям величин: δx ≠ 0, δt = 0 и с2 = ∞ [1]. Пренебрежение временным различием между причиной и следствием приводит к неточности задания направлений и абсолютных значений сил в классической механике. Покажем это.
Примем в качестве геометрического образа пространства и времени четырехмерное собственно евклидово пространство (такая модель, как известно, не противоречит классической механике Ньютона). Поскольку все четыре координаты в этом пространстве должны измеряться в одних единицах, положим по аналогии с тем, как делается в теории относительности, что временная координата есть ct, где c – скорость света в вакууме, t – время. В настоящем разделе мы будем интерпретировать величины |
где То обстоятельство, что причина и следствие проявляются в различные моменты времени, означает принадлежность их различным гиперплоскостям одномоментных событий (рис. 4.1). В связи с этим сразу встает вопрос: «Куда направлены силы, приложенные к причине и следствию: лежат они в соответствующих гиперплоскостях одномоментных событий или направлены вдоль прямой, соединяющей точку-причину и точку-следствие?» Классическая механика не позволяет сделать выбор между такими возможностями. Поэтому воспользуемся соображениями симметрии. В связи с тем, что причинно-следственное звено имеет в качестве элемента симметрии ось вращения, проходящую через составляющие его точки, естественно ожидать, что и система сил, связанных с ним, обладает той же симметрией. Это дает основание полагать, что силы взаимодействия направлены вдоль прямой, соединяющей причину и следствие, как показано на рис. 4.1. Такая ориентация сил отвечает и релятивистской симметрии пространства и времени. (Отметим, что приведенное рассуждение не относится к добавочным силам, введенным в разд. 3, потому что симметрия последних определяется свойствами не только причинно-следственного звена, но и времени.)
Рис. 4.1. Причина П и следствие С при осуществлении причинного взаимодействия F – сила взаимодействия причины и следствия; Fв – составляющая силы F вдоль оси времени; Fг– составляющая силы F вдоль гиперплоскости одномоментных событий; |
При указанном направлении сил взаимодействия они имеют ненулевую составляющую вдоль оси времени, что не учитывается классической механикой. Найдем связь этой составляющей с составляющей тех же сил, лежащей в гиперплоскости одномоментных событий. Воспользовавшись тем обстоятельством, что при проецировании на гипер-плоскость прямая переходит в прямую, нетрудно заключить, что вектор силы взаимодействия F и обе его составляющие, о которых идет речь, лежат в (двухмерной) плоскости, проходящей через три точки — точку-причину П, точку-следствие С и точку C′ (где C′ — проекция точки С на соответствующую точке П гиперплоскость одномоментных событий). При этом одна из составляющих вектора F перпендикулярна, а другая параллельна отрезку ПC′. С учетом данного факта из рис. 4.1 можно видеть, что составляющая Fв, направленная вдоль оси времени, и составляющая Fг, направленная вдоль гиперплоскости одномоментных событий, связаны зависимостью
Отсюда, используя закон (4.2), находим
Итак, принятие условия Разумеется, использованное нами утверждение о том, что силы взаимодействия направлены именно вдоль прямой, соединяющей причину и следствие, является всего лишь гипотезой. Возможны и другие варианты. Например, если подобно тому, как это делается в теории относительности, определять силу как производную импульса по времени, то она обязательно будет лежать в гиперплоскости одномоментных событий, потому что в ней лежит вектор импульса. Вместе с тем, до тех пор, пока вопрос о действительном направлении сил взаимодействия окончательно не решен, необходимо учитывать возможность присутствия у сил временной составляющей. В классической механике неточность задания сил проистекает еще и из-за неучета взаимного смещения причины и следствия, которое происходит за промежуток времени Принятое в классической механике допущение о совпадении моментов проявления причины и следствия означает, что точками приложения сил взаимодействия считаются точки мировых линий причины и следствия, находящиеся в одной гиперплоскости одномоментных событий. При
Рис. 4.2. Проекции причинно-следственного звена на гиперплоскости одномоментных событий, проходящие через точку-причину П (а) и точку-следствие С (б)
Fг — составляющая силы взаимодействия причины и следствия, направленная вдоль гиперплоскости одномоментных событий; Fкл — сила, рассматриваемая в классической механике; ψ1, ψ2 — углы между векторами сил Fг и Fкл; С0 — точка пересечения мировой линии следствия с гиперплоскостью одномоментных событий, проходящей через точку-причину П; C′ — проекция точки-следствия С на ту же гиперплоскость; П0 — точка пересечения мировой линии причины с гиперплоскостью одномоментных событий, проходящей через точку-следствие С; П′ — проекция точки-причины П на ту же гиперплоскость; |
Из рисунка непосредственно видно, что из-за взаимного перемещения причины и следствия отрезок, соединяющий одномоментные точки их мировых линий, имеет в данных двух ситуациях как разное направление, так и разную длину (на рис. 4.2,а это есть отрезок ПС0, на рис. 4.2,б – отрезок П0С). Сила взаимодействия, рассматриваемая в классической механике, направлена как раз вдоль данного отрезка и однозначно определяется его длиной. На рисунке она обозначена через Fкл. Вместе с тем составляющая Fг действительной силы взаимодействия F имеет иное направление – вдоль отрезка, соединяющего проекции точки-причины П и точки-следствия С на гиперплоскость одномоментных событий (на рис. 4.2,а и б соответственно ПC′ и П′С). Отметим, что линия действия составляющей Fг является одной и той же при любом направлении силы взаимодействия F в плоскости ПСС′ (см. рис. 4.1), в частности, и в том случае, когда сила F не имеет временной составляющей, то есть при F = Fг. Следует отметить также, что системы векторов, изображенные на рис. 4.2,а и на рис. 4.2,б, могут располагаться в четырехмерном пространстве-времени в плоскостях, которые не параллельны друг другу; однако принадлежащие этим плоскостям прямые, помеченные на рисунках ортом i, параллельны между собой. Оценим вначале неточность направления силы Fкл. При этом временно пренебрежем неточностью ее абсолютного значения. Допустим, что ускорения взаимодействующих точек столь малы, что участки мировых линий, проходимые ими за промежуток времени
где uс┴, uс|| — составляющие скорости движения следствия, соответственно перпендикулярная и параллельная силе Fг; uп┴, uп|| — то же для причины; i — единичный вектор, лежащий на линии действия силы Fг и направленный от точки П к точке С′ (на рис. 4.2,а) или от П′ к С (на рис. 4.2,б); здесь использован закон (4.2); все скорости определяются по отношению к некоторой инерциальной системе координат. Будем считать, что скорости движения следствия uс и причины uп малы по сравнению с константой c2: |uс| << |c2|, |uп| << |c2|. Тогда на основании (4.4) можем записать (в линейном по |uс|/|c2| и |uп|/|c2| приближении)
В этом случае разность сил Fг – Fкл приближенно описывается следующими выражениями для двух рассматриваемых ситуаций в предположении, что длины векторов Fг и Fкл примерно равны (см. рис. 4.2):
где γ = sign(Fг ∙ i), коэффициент γ равен +1 или –1 в зависимости от того, взаимодействуют причина и следствие силами отталкивания (Fг ∙ i > 0) или притяжения (Fг ∙ i < 0); множители uс┴/|uс┴| и uп┴/|uп┴| играют роль орта, задающего направление силы Fг – Fкл. Из зависимостей (4.6) вытекает, что для компенсации неточности направления действия силы Fкл необходимо прибавить к ней добавочную силу F^, равную в среднем
Из тех же зависимостей (4.6) следует, что крайние положения силы Fкл, изображенные на рис. 4.2,а и б, различаются на величину ΔFкл┴, равную
где vс┴ — перпендикулярная силе Fг составляющая вектора vс скорости движения следствия относительно причины (vс = uс – uп). Отметим, что величина ΔFкл┴ имеет инвариантный характер, так как она определяется относительной скоростью движения причины и следствия, в то время как величина F^, вследствие зависимости ее от скоростей, определяемых по отношению к используемой системе координат, зависит от выбора этой системы координат и поэтому не инвариантна. Теперь оценим неточность задания абсолютного значения силы Fкл (пренебрегая неточностью ее направления). Рассмотрим типичный закон взаимодействия, когда модуль силы обратно пропорционален квадрату расстояния между взаимодействующими материальными точками:
здесь f обозначает все входящие в закон величины, кроме расстояния. Согласно постулатам причинной механики пространственное расстояние между причиной и следствием при осуществлении взаимодействия есть |
В случае |uс| << |c2|, |uп| << |c2|, как следует из выражений (4.5), имеют место приближенные равенства cos ψ1 ≈ 1, cos ψ2 ≈ 1 (верные в линейном приближении по |uс|/|c2|, |uп|/|c2| ). Учитывая это и закон (4.2), получаем из равенств (4.10) следующие значения r1 и r2:
Подстановка этих значений расстояния в закон (4.9) дает для двух анализируемых ситуаций такие значения модуля силы:
где F = f / | Из выражений (4.12) следует, что для компенсации неточности в задании модуля силы Fкл нужно прибавить к ней добавочную силу F||, составляющую в среднем
где учтено, что векторы i, uс||, uп||, Fг параллельны между собой и приближенно параллельны вектору Fкл. Из выражений (4.12) вытекает также, что размах значений модуля силы Fкл в двух анализируемых ситуациях таков, что соответствующая ему разностная сила ΔFкл|| равна
где vс|| – параллельная силе Fг составляющая вектора vс скорости движения следствия относительно причины. Здесь аналогично тому, как это имело место ранее, сила ΔFкл|| является инвариантной величиной, а сила F|| не является таковой. При практическом использовании формул (4.7), (4.8), (4.13), (4.14) удобно выражать задаваемые ими силы через среднее значение «классической» силы. Далее именно это среднее значение будем обозначать символом Fкл. В связи с тем, что указанные силы малы в сравнении с Fкл, полученные формулы останутся справедливыми (в рассмат-риваемом линейном приближении по |uс|/|c2|, |uп|/|c2| ), если заменить в них действительные силы их приближенным «классическим» значением, а также считать, что входящие в них составляющие скоростей, помеченные значками ^ и ||, направлены соответственно перпендикулярно и параллельно не силе Fг, а силе Fкл. Производя указанные изменения, заключаем на основании формул (4.8) и (4.14), что разность между анализируемыми крайними значениями «классической» силы может быть представлена в виде суммы следующих двух составляющих, первая из которых перпендикулярна, а вторая параллельна силе Fкл:
где γ = sign(Fкл ∙ i); F = |Fкл|. А на основании формул (4.7), (4.13) приходим к выводу, что добавочные силы, которые необходимо прибавить к «классической» силе Fкл для компенсации неточностей ее направления и абсолютного значения, имеют вид
причем первая из этих сил перпендикулярна, а вторая параллельна силе Fкл. Напомним, что при выводе формул (4.16) и (4.18) использован закон взаимодействия (4.9). Присоединим сюда формулу для временнй составляющей силы взаимодействия, о которой шла речь ранее. Из выражения (4.3) легко получаем, что
где V – «скорость» движения нашего Мира вдоль оси времени (вектор V параллелен оси времени, направлен из прошлого в будущее и имеет модуль c: |V| = c); здесь учтено, что вектор Fв при отталкивающем характере взаимодействия направлен в ту же сторону, что и V, а при притягивающем – в противоположную сторону (см. рис. 4.1). Таким образом, в классической механике, из-за неучета временного различия между моментами проявлений причины и следствия, сила взаимодействия оказывается заданной не точно. Погрешности имеют ее составляющие по трем взаимно перпендикулярным направлениям: по оси времени и по двум направлениям, лежащим в гиперплоскости одномоментных событий, — вдоль самой силы и перпендикулярно к ней. В разд. 3 обсуждалась еще одна неточность «классической» силы, которая обусловлена специфическим воздействием времени. Выпишем все четыре добавки, компенсирующие неточности «классических» сил, применительно к частному случаю покоящейся точки-причины (uп = 0). Воспользовавшись формулами (3.11), (4.17) – (4.19), имеем
Здесь учтено следующее: а) причинно-следственное звено, рассмотренное в разд. 3, представляет собой в действительности не само это звено, а пару одномоментных точек мировых линий причины и следствия, поэтому точки П, С и сила Fс из разд. 3 есть фактически точки П, С0 (или П0, С ) и сила Fкл из настоящего раздела (ср. рис. 3.1 – 3.3 с рис. 4.1, 4.2); б) формула (3.11), выписанная для случая uп = 0, uс|| = 0, сохраняет силу и при uс|| ≠ 0, если заменить в ней величину v (равную |vс|) на |vс┴| (так как согласно формулам (З.6) и (3.9) составляющая vс|| не дает вклада в силу Кс); в) uс = vс при uп = 0. Отметим, что все четыре добавочные силы взаимно перпендикулярны (напомним, что орт l ортогонален векторам vс и Fкл). 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|

 (3.4)
(3.4)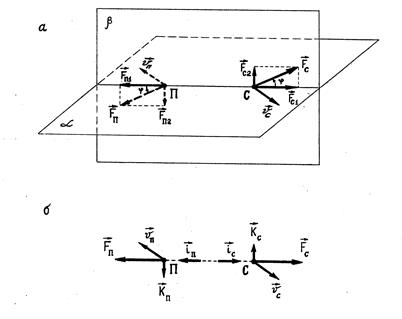


 (3.6)
(3.6) (3.7)
(3.7) (3.8)
(3.8) (vс, Fс)) << |c2|. Для простоты будем предполагать, что |vс| << |c2|. Мы обсудим формулы (3.6), (3.7) ниже, после описания третьего возможного варианта воздействия времени на причинную связь.
(vс, Fс)) << |c2|. Для простоты будем предполагать, что |vс| << |c2|. Мы обсудим формулы (3.6), (3.7) ниже, после описания третьего возможного варианта воздействия времени на причинную связь. (3.9)
(3.9) (3.10)
(3.10) (3.11)
(3.11) (3.12)
(3.12) iс. Формулы (3.11), (3.12) согласуются с формулами для добавочных сил, приведенными в причинной механике [1]. Именно по аналогии с последними мы ввели для параметра, входящего в правые части наших формул, обозначение c2. Отметим, что если взаимодействие причины и следствия имеет отталкивающий характер, то Fс = Fiс, Fп = Fiп, и тогда формулы (3.6), (3.7) из варианта 2 принимают вид (3.9), (3.10). Поэтому в описываемом частном случае они также могут быть представлены в форме (3.11), (3.12). Таким образом, предложенные варианты 2 и 3 воздействия времени на причинно-следственную связь можно рассматривать как возможные непосредственные обобщения соответствующих положений причинной механики.
iс. Формулы (3.11), (3.12) согласуются с формулами для добавочных сил, приведенными в причинной механике [1]. Именно по аналогии с последними мы ввели для параметра, входящего в правые части наших формул, обозначение c2. Отметим, что если взаимодействие причины и следствия имеет отталкивающий характер, то Fс = Fiс, Fп = Fiп, и тогда формулы (3.6), (3.7) из варианта 2 принимают вид (3.9), (3.10). Поэтому в описываемом частном случае они также могут быть представлены в форме (3.11), (3.12). Таким образом, предложенные варианты 2 и 3 воздействия времени на причинно-следственную связь можно рассматривать как возможные непосредственные обобщения соответствующих положений причинной механики. (3.13)
(3.13)
 (4.1)
(4.1) x| и |
x| и |  (4.2)
(4.2) – постоянная тонкой структуры (
– постоянная тонкой структуры ( 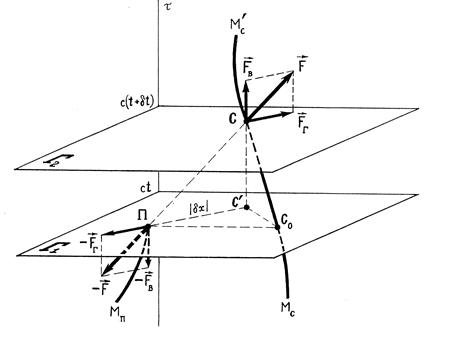
 x|, |
x|, | 
 (4.3)
(4.3)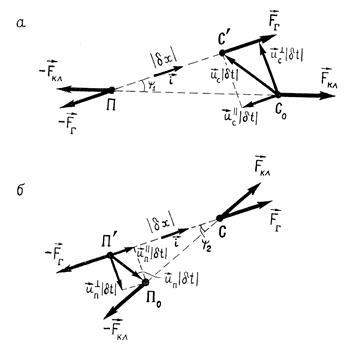
 (4.4)
(4.4) (4.5)
(4.5) (4.6)
(4.6) (4.7)
(4.7) (4.8)
(4.8) (4.9)
(4.9) (4.10)
(4.10) (4.11)
(4.11) (4.12)
(4.12) (4.13)
(4.13) (4.14)
(4.14) (4.15)
(4.15) (4.17)
(4.17) (4.18)
(4.18) (4.19)
(4.19) (4.20)
(4.20)