
|
|
Системы ориентации по звездному полюСистемы предназначены для определения координат относительно некоторой группы звезд. Существуют два типа систем ориентации по звездному полю: – цифровые корреляторы; – оптические корреляторы.
Система ориентации по звездному полю с использованием цифрового коррелятора
ОД – оптический датчик – узкопольное сканирующее оптическое устройство. Его задача – просмотр заданного участка звездного неба без пропусков. Чаще всего траектория сканирования – спиралеобразная. Затем сравнивается с сигналом, который хранится в базе данных. Недостаток: большая длительность поиска.
Оптические корреляторы
Устройство состоит из двух каналов: регистрирующего и анализирующего. Переключение между каналами осуществляется поворотным зеркалом 6. В режиме регистрации изображение участка звездного неба формируется объективом 1 на регистрирующем элементе 2 (фотопластинка или фототермопластический модулятор). После экспозиции изображение на элементе 2 проявляется и фиксируется. Зеркало 6 откидывается и в работу включается канал анализа. Этот канал состоит из осветителя 3,4 (лазер и расширитель пучка) и анализирующего объектива 5. элемент 2 в этом случае выполняет функции входного транспаранта. Пространственный спектр изображения, который содержится на элементе 2, формируется в фокальной плоскости объектива 5, где установлен фильтр пространственных частот 8. После прохождения лазерного излучения через фильтр 8 образуется световое поле, описываемое функцией временной корреляции входного изображения и изображения, чей спектр записан на фильтре 8. эта функция анализируется в БЦВМ 11 после преобразования оптического сигнала в электрический в телекамере 9,10. Если фильтр 8 является согласованным с входным изображением, то функция корреляции представляет собой яркую осесимметричную точку, положение которой относительно оптической оси определяется сдвигом анализируемого и эталонного спектра. Если фильтр 8 соответствует изображению, отличному от входного, то в устройстве автоматически заменяется фильтр 8.
Системы навигации по наземным ориентирам Три основных типа этих систем: 1) системы ориентации по высоте профиля местности; 2) системы ориентации по профилю горизонта; 3) системы ориентации по изображению подстилающей поверхности. В зависимости от используемого датчика системы бывают: – телевизионные; – лазерно-локационные – НК
По рельефу местности
На ЛА устанавливается болометрический датчик высоты и высокоточный высотомер.
В бортовом ЗУ хранится информация о высоте рельефа в некоторой полосе вдоль предполагаемой траэктории движения носителя. Обычно используются измерения в сетке СС размерами ячеек от 80ģ80 до 150ģ150.
Изменение высоты в надире h1 сравниваются со значениями, записанными в ЗУ. Для правильной работы алгоритма необходимо знать начальное местоположение носителя. Затем по результатам сравнения траектория носителя постоянно корректируется. Недостатки: необходимость в больших обьемах постоянных вычислений; Необходимость пролета некоторого участка для начальной ориентации.
Системы ориентации по профилю горизонта
Эталонные изображения формируются для нескольких высот и в большом поле зрения. Навигация осуществляется по заранее известной траектории от точки к точке. При этом текущее изображение формируется в относительно малом поле зрения и в цифровом корреляторе сравнивается с эталонными изображениями для данной точки траектории. Затем летательный аппарат доворачивается в нужном направлении и движется до следующей контрольной точки маршрута. Недостатки: привязка к геометрическим формам рельефи.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|


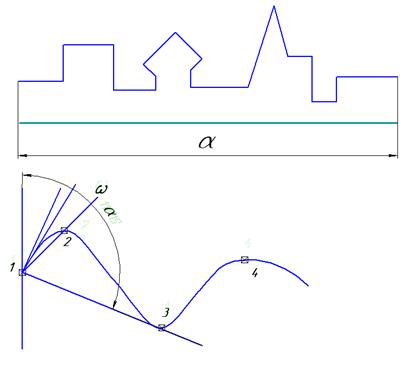 В этом случае в БЗУ хранятся наборы профилей горизонта для определения точек на траектории полета. Текущее изображение получают с помощью телевизионных либо ИК впередсмотрящих систем.
В этом случае в БЗУ хранятся наборы профилей горизонта для определения точек на траектории полета. Текущее изображение получают с помощью телевизионных либо ИК впередсмотрящих систем.