|
|
Сканирование ПМВ с линейным сканированием
Данный метод предпологает пересечение двух пар противоположных точек горизонта по линейной траектории, за тем анализируются временне промежутки визирования поверхностей планеты и космического пространства. Можно использовать зеркала либо призмы. В следствии сложности практически почти не используется.
ИК ПМВ с нелинейным сканированием. В отличии от рассмотреных ранее устройств позволяют использовать один датчик горизонта, который просматривает весь горизонт по линейной траектории. Наибольшими употребляемыми траекториями сканироваеия являються лепестковая, синусоидальная, удлинение гипоциклоиды и эпициклоиды.
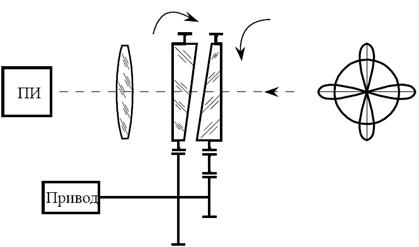
Пример оптического сканера с много лепестковой разверткой. Оптическая ось датчика будет направлена на центр видимого круга только в том случае если лепестки симметричны относительно этого центра.
В данной схеме угол наклона зеркала определяется углом 2α и задается исходя из углового размера ИК- горизонта, угол β определяется углом при вершине клина и задается исходя из требующей амплитуды сканирования вдоль горизонта (а)
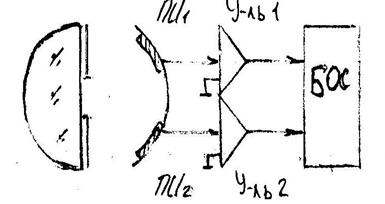
Радиационно-балансный ПМВ В отличии от рассмотренных ранее устройств анализируют не временные соотношения в сигнале, а разность энергетических освещенностей формируемых противоположными протяженными участками видимого диска планеты.
Две пары тепловых приемников излучения вырабатывают сигналы которые сравниваются между собой в блоке обработки сигнала, точность устройства=10.
ПМВ видимого диапазона Так как изображение планеты имеет форму, определенную фазовым углом (угол между линией наблюдатель-планета, планета-Солнце), то для работы ПМВ видимого диапазона необходимо знать местоположение Солнца, поэтому ПМВ видимого диапазона работают совместно с датчиками Солнца. Направление на местную вертикаль можно определить по виду серпа, как точку лежащую на биссектрисе угла охвата γ серпа на расстояние RГ от горизонта R – радиус Земли, Н – высота над поверхностью. В выше приведенных формулах неизвестным остается фазовый угол β, который определяется с помощью солнечного датчика. Так же как и в ИК ПМВ в данном случае существует сканирующее и не сканирующее устройство.
Сканирующие ПМВ видимого диапазона Используются весьма нечасто.
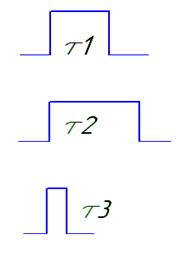
Сканирующие системы определяют местоположение не менее 3-ех точек видимого горизонта. По этим точкам определяется центр описанной окружности, т. е. направление местной вертикали. В случае линейного сканирования можно анализировать длительность импульсов от каждого канала и при совпадении длительности крайних импульсов τ1=τ2 считается что визирная ось сканера направлена на МВ.
t1=t2- ось на местной вертикали Сигнал на ПИ формируется только в том случае если на этот приемник попадает изображение серпа и в тот момент когда приемник открывается щелевой диафрагмой в виде спирали Архимеда. Анализируются временные соотношения между фронтами сигнальных импульсов. Если эти расстояния равны, то направление МВ совпадает с осью вращения модулятора.
Несканирующие ПМВ видимого диапазона Подавляющее большинство ПМВ являются несканирующими и строятся на базе матричных приемников излучения. По мощности несканирующие ПМВ уступают сканирующим. Их средняя точность 1-3°. Систематическая погрешность ПМВ видимого диапазона ниже чем в ИК диапазоне.
Системы ориентации по Солнцу Существуют два типа систем ориентации по Солнцу: – системы грубой ориентации; – системы точной ориентации. Системы грубой ориентации предназначены для поиска направления на Солнце и наведения на него системы точной ориентации. Системы точной ориентации выполняют два типа задач: – слежение за Солнцем; – определение координат центра Солнца. Системы грубой ориентации, как правило, строятся на основе щелевых датчиков (сканирующие системы) или на основе светорассеивающих стекол и ножевых диафрагм (несканирующие системы)

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|




 ,
,