
|
|
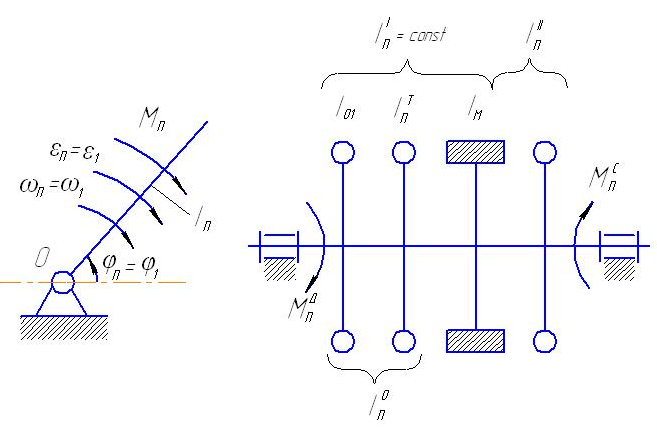
Выбор динамической модели и её обоснованиеДля упрощения составления уравнений движения машины используется условная динамическая модель, которая должна удовлетворять следующим условиям: 1. Число независимых координат модели и механизма машины равны между собой; 2. Кинетическая энергия динамической модели должна быть равна сумме кинетических энергий всех подвижных звеньев машины; 3. Работа всех сил в машине должна быть равна работе сил (моментов) динамической модели на возможном перемещении. На рисунке 3.6. представлена наиболее простая динамическая модель машинного агрегата.
Рисунок 3.6. Динамическая модель машинного агрегата В качестве такой модели рассмотрим вращающееся звено - звено приведения, которое имеет момент инерции Iп относительно оси вращения (приведенный момент инерции) и находится под действием приведенного момента сил МП. МП = МДП + МСП, где МДП – приведенный момент движущих сил; МСП – приведенный момент сил сопротивления. IП = IIП + IIIП, где IIП - постоянная составляющая приведенного момента инерции; IIIП - переменная составляющая приведенного момента инерции. В величину IIП входят: I01 – cобственный момент инерции кривошипа; IМ – момент инерции маховика; IТРП – приведенный момент трансмиссии. Причем необходимость установки маховика определяется на основании заданной неравномерности движения кривошипа. Построение индикаторной диаграммы и расчет движущей силы для всех положений механизма На индикаторной диаграмме (Л.1 п.3) изображена графическая зависимость давления Р от перемещение ползуна S. Для определения значений давления Р и силы F для всех 13 положении механизма необходимо выбрать масштабный коэффициент на индикаторной диаграмме. Примем Снимая значения уi с индикаторной диаграммы, рассчитаем давление на поршень по формуле:
Рассчитаем площадь поперечного сечения поршня:
где d – диаметр поршня.
Сила, действующая на поршень, рассчитывается по формуле:
Определим величину давления и силы, действующих на поршень для всех 13 положений, и занесем полученные данные в таблицу 3.7.
Таблица 3.7. Расчетные значения давления и силы
Сила Pi для всех 13 положений отрицательна, так как не совпадает по направлению с осью OY. Расчет приведенного момента движущих сил в двух Контрольных положениях Приведенный момент сил имеет вид: МП = МДП + МСП; Определение МДП выполняется из условия равенства мгновенных мощностей:
Тогда:
где Fxи Fy–проекции силы Fi на оси координат; хi′и yi′– проекции аналога скорости на оси координат; ii1 – передаточная функция от i-го звена к кривошипу; sign(ω1)= +1, если ω1 направлена против часовой стрелки; sign(ω1)= –1, если ω1 направлена по часовой стрелке.
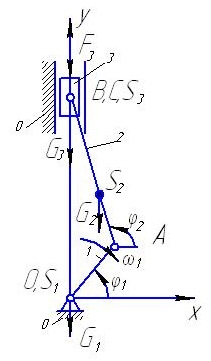
На рисунке 3.7. изображены векторы всех сил, действующих на механизм.
Рисунок 3.7. Направление активных сил Для данного механизма сила F3. отрицательна. Рассчитываем приведенный момент движущих сил для контрольного положения №3 (φ1=30º) и №9 (φ1=210º):
где yS2′- проекция аналога скорости точки S2 на ось у.
Построение графика приведенных моментов движущих сил и сил сопротивления
Исходя из данных, выбираем масштабный коэффициент
Таблица 3.8 –Значения приведенного момента движущей силы
3.9 Определение работы движущих сил
Определяем работу движущих сил
где
Δφ1=2π/12=0,5236рад
Работа сил сопротивления АС1 = 0 Дж, а АС13 = -5122,6 Дж. Данная величина изменяется по линейному закону, следовательно, все остальные её значения можно определить из графика работ. Определяем МПС: МПС=-АДЦ/2π=-5122,6/(2π)=-815,7 Н∙м Построение графика изменения работы движущих сил и сил сопротивления
График изменения работы сил состоит из двух линий: кривая движущих сил и прямая сил сопротивления. Масштабный коэффициент Таблица 3.8 – Значения работы сил

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 , тогда
, тогда 





















 .
. , Н∙м
, Н∙м
 . Для всех положений:
. Для всех положений:














