
|
|
Двигатели постоянного токаДиаграмма, поясняющая принцип действия двигателя постоянного тока, имеет вид
UFМкр Iя
Под воздействием приложенного напряжения по обмоткам якоря и возбуждения протекают токи. Ток возбуждения создает магнитный поток. На проводники якоря с током в магнитном поле действует сила, заставляющая якорь вращаться. Классификация двигателей по способу подключения обмотки возбуждения: – двигатели независимого возбуждения (ДНВ); – двигатели с параллельным возбуждением, шунтовые (рис. 3.46, а); – двигатели с последовательным возбуждением, сериесные (рис. 3.46, б); – двигатели со смешанным возбуждением, компаундные (рис. 3.46, в). На рис. 3.46 представлены схемы включения двигателей, где Rо.в – сопротивления в цепи обмотки возбуждения; Rд – добавочное сопротивление в цепи якоря; ОВс и ОВш – сериесная и шунтовая обмотки возбуждения.

Противоэдс в двигателе. При направлении тока, указанном на рис. 3.47, якорь будет вращаться против часовой стрелки (правило левой руки). Индуцируемая ЭДС будет направлена против тока (правило правой руки).
На основании второго закона Кирхгофа для якорной цепи имеем уравнение электрического равновесия для двигателя
из которого находим
Зависимость магнитного потока и момента от тока якоря в двигателе. У шунтового двигателя машины Ф = const, так как iв не зависит от Iя. У сериесного двигателя Ф создается током якоря.
а б
Рис. 3.48. Зависимость магнитного потока (а) и момента (б) от тока якоря (1 – сериесный двигатель; 2 – компаундный; 3 – шунтовый) У компаундного двигателя зависимость Ф = f(Iя)занимает промежуточное положение между зависимостью для сериесного и шунтового двигателей. При У шунтовой машины При перегрузке Механическая характеристика ДТП (рис. 3.49).Используя соотношения
получаем
Рис. 3.49. Механические характеристики двигателей: 1 – шунтовый; 2 – компаундный; 3 – сериесный
Особенностью сериесных двигателей является то, что при Пуск ДТП. Проблемы пуска: 1. Большой пусковой ток якоря Iя.п. Из уравнения электрического равновесия для якорной цепи имеем
Пусть 2. Тяжелые условия коммутации, связанные с большими пусковыми токами. 3. Большой пусковой момент, который приводит к ударной нагрузке на исполнительный механизм во время пуска. Самый распространенный способ пуска – введение в цепь якоря добавочных сопротивлений Rд (реостатный пуск). За счет введения Rд уменьшается пусковой ток и пусковой момент. На рис. 3.50 изображены механические характеристики, иллюстрирующие процесс пуска (М1 и М2 – заданные пределы изменения момента при пуске; Мс – момент сопротивления механизма).
Рис. 3.50. Реостатный пуск
Способы регулирования скорости двигателей постоянного тока. Из выражения – за счет изменения питающего напряжения при постоянном магнитном потоке; – введением в цепь якоря добавочных сопротивлений; – изменением магнитного потока. 1. Регулирование скорости изменением питающего напряжения при постоянном магнитном потоке. Механические характеристики при регулировании скорости изменением питающего напряжения имеют вид
Метод позволяет регулировать скорость плавно и в широких пределах. 2. Регулирование скорости путем введения в цепь якоря добавочного сопротивления (рис. 3.52). Анализируя М, имеем
Недостаток метода – большие потери энергии в добавочном сопротивлении. 3. Регулирование скорости за счет уменьшения магнитного потока. На рабочем участке механических характеристик Метод позволяет плавно регулировать скорость в сторону ее увеличения. Вывод: двигатели постоянного тока позволяют осуществлять плавную регулировку скорости в широких пределах, что является основным их достоинством по сравнению с асинхронными двигателями. Общие сведения о режимах торможения: 1. Торможение противовключением: двигатель принудительно вращается в сторону, противоположную к Мвр. 2. Генераторное торможение: двигатель принудительно вращают со скоростью > n0. 3. Динамическое торможение: двигатель отключается от сети, якорь замыкается на сопротивление. Согласно принципу Ленца, в якоре индуцируется ток, вызывающий тормозной момент. Для реверсирования двигателя необходимо изменить направление тока либо в обмотке возбуждения, либо в якоре. Одновременное изменение токов в обмотке возбуждения и в якоре не приводит к реверсу двигателя. Это позволяет создавать коллекторные двигатели, работающие как в цепях постоянного тока, так и в цепях переменного тока. Общие сведения об универсальном коллекторном двигателе. Двигатель может работать как на постоянном, так и на переменном токе. Особенности данного двигателя: 1. Двигатель делают с последовательной обмоткой возбуждения, чтобы не было сдвига фаз между Iя и Ф. 2. Так как двигатель работает в цепи переменного тока, то магнитный поток тоже переменный, и для уменьшения потерь на вихревые токи сердечники полюсов делают шихтованными.
Преимущество коллекторного двигателя по сравнению с асинхронным – возможность получения скорости более 3000 об/мин для стандартной частоты. Недостатки – малый КПД и плохая коммутация.
Выбор двигателя
При выборе двигателя для конкретных технологических целей необходимо учитывать: – род тока и напряжение; – скорость вращения; – конструктивное исполнение двигателя; – мощность двигателя.
Выбор мощности двигателя
Мощность двигателя выбирают с учетом условий его нагрева. Режимы работы двигателя по условиям нагрева: 1.Продолжительный режим (рис. 3.54) – режим, при котором двигатель нагревается до установившейся температуры. Различают продолжительный режим с постоянной и переменной нагрузкой.
Рис. 3.54. Нагрузочные диаграммы продолжительного режима с постоянной (а) и переменной (б) нагрузкой
2. Повторно-кратковременный режим (рис. 3.55, а) – режим, при котором за время работы двигатель не успевает нагреться до установившейся температуры, а за время паузы не успевает остыть до температуры окружающей среды.
а б Рис. 3.55. Нагрузочная диаграмма повторно-кратковременного (а) и кратковременного (б) режима
Параметром, определяющим условия работы двигателя в этом режиме, является продолжительность включения (ПВ).
3. Кратковременный режим (рис. 3.55, б) – режим, при котором за время включения двигатель не успевает нагреться до установившейся температуры, а за время паузы успевает остыть до температуры окружающей среды. Выбор мощности двигателя 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|



 В двигателях ЭДС направлена против тока и поэтому называется противоэдс.
В двигателях ЭДС направлена против тока и поэтому называется противоэдс. ,
, .
.
 максимальный поток у сериесной машины.
максимальный поток у сериесной машины. , так как
, так как  . У сериесной машины
. У сериесной машины  . Учитывая, что
. Учитывая, что  (начальный участок зависимости), получаем
(начальный участок зависимости), получаем  . Зависимость M = f(Iя) у компаундного двигателя занимает промежуточное положение между этой же зависимостью для сериесного и шунтового двигателей.
. Зависимость M = f(Iя) у компаундного двигателя занимает промежуточное положение между этой же зависимостью для сериесного и шунтового двигателей. максимальный момент – у сериесного двигателя, поэтому он обладает большой перегрузочной способностью, так как при перегрузке развивает максимальный момент.
максимальный момент – у сериесного двигателя, поэтому он обладает большой перегрузочной способностью, так как при перегрузке развивает максимальный момент.

 – электромеханическая характеристика;
– электромеханическая характеристика; –механическая характеристика.
–механическая характеристика.
 ток якоря и Ф тоже стремятся к нулю, а n стремится к бесконечности. Поэтому эти двигатели нельзя оставлять работать в холостую.
ток якоря и Ф тоже стремятся к нулю, а n стремится к бесконечности. Поэтому эти двигатели нельзя оставлять работать в холостую. .
. при
при  , тогда
, тогда  = = (10…30) Iя.н.
= = (10…30) Iя.н.
 вытекают три способа регулирования скорости:
вытекают три способа регулирования скорости:
 Анализируя М в этой системе уравнений, имеем
Анализируя М в этой системе уравнений, имеем


 Метод позволяет плавно регулировать скорость в сторону ее уменьшения от исходной.
Метод позволяет плавно регулировать скорость в сторону ее уменьшения от исходной. (рис. 3.53).
(рис. 3.53).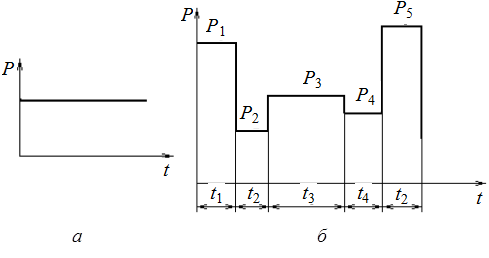


 .
.