
|
|
Способы регулирования скоростиАсинхронного двигателя Преобразуем выражение для скольжения:
где р – число пар полюсов; Согласно полученному выражению существуют следующие способы регулирования скорости n2: - регулирование скорости за счет изменения числа пар полюсов; - изменением частоты тока; - введением в ротор добавочных сопротивлений.
Регулирование скорости за счет изменения числа пар полюсов (рис. 3.26). Число пар полюсов  где k – количество катушек в статоре. где k – количество катушек в статоре.
Обмотки в статоре делятся на полуобмотки, которые включаются либо последовательно, либо параллельно. За счет этого изменяется число пар полюсов и, следовательно, скорость вращения магнитного поля и скорость ротора: Недостатки этого метода: – усложняется конструкция двигателя; – возможно только ступенчатое регулирование в сторону уменьшения скорости от 3000 об/мин. Регулирование скорости за счет изменения частоты питающего напряжения (рис. 3.27). Изменение частоты питающего напряжения приводит к изменению скорости вращения магнитного поля n0, а следовательно, и скорости ротора:
Метод позволяет плавно регулировать частоту вращения ротора в широких пределах. Недостаток метода – необходимость применения дорогостоящего частотного преобразователя.
Рис. 3.27. Структурная схема (а) и механические характеристики АД (б) при регулировании скорости изменением частоты сети (ЧП – частотный преобразователь) Регулирование скорости за счет введения в цепь ротора добавочных сопротивлений (рис. 3.28). В цепь фазного ротора вводятся добавочные сопротивления RД(как при пуске).
Метод позволяет плавно регулировать скорость в сторону ее уменьшения. Недостаток метода – большие потери энергии в добавочных активных сопротивлениях.

Вывод: плавное регулирование скорости в широких пределах в асинхронных двигателях затруднительно, что является основным недостатком асинхронных двигателей.
Тормозные режимы работы АД
Тахограмма работы электропривода представлена на рис. 3.29, где I – разгон; II – время технологической операции; III – торможение.
Рис. 3.29. Тахограмма работы электропривода
Чем меньше время разгона и торможения, тем выше производительность труда. В тормозных режимах момент, развиваемый двигателем, направлен против вращения, т.е. скорость и момент должны иметь на графиках разные знаки. На рис. 3.30 представлены механические характеристики АД при работе в двигательном режиме (квадрант I) и в тормозных режимах (квадранты II и IV).
Рис. 3.30. Тормозные режимы работы: 1 – естественная характеристика; 2 – реостатная характеристика
1. Генераторное торможение (квадрант II). За счет внешних сил достигается 2. Торможение противовключением (квадрант IV). Направления вращения магнитного поля и ротора противоположны. Может создаваться введением в цепь ротора добавочного сопротивления (например, при спуске груза краном) или изменением направления вращения магнитного поля. В этом случае двигатель развивает тормозной момент. Существует также режим динамического торможения. При этом двигатель отключают от сети переменного тока и подключают под постоянное напряжение. Постоянный ток создает неподвижное магнитное поле. По закону электромагнитной индукции в роторе возникают ЭДС и ток, а также согласно принципу Ленца – сила, тормозящая движение ротора.
Энергетические характеристики АД
важными характеристиками АД являются зависимости КПД и коэффициента мощности от коэффициента загрузки b =
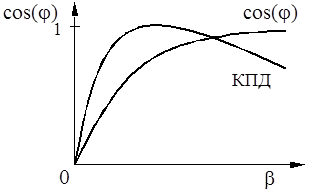
Рис. 3.31. Зависимость КПД и коэффициента мощности от коэффициента загрузки
Однофазный АД
Пусть в статоре асинхронного двигателя имеется одна обмотка. Рассмотрим создаваемый ею магнитный поток (рис. 3.32).
Рис. 3.32. Двигатель с одной обмоткой в статоре (а) и магнитный поток в ней (б)
Одна обмотка создает магнитный поток Ф, вектор которого направлен по оси обмотки. Длина вектора изменяется по синусоидальному закону Из рис. 3.32, б имеем Это позволяет представить двигатель с одной обмоткой в статоре как два одинаковых трехфазных асинхронных двигателя, имеющих общий вал и вращающихся в противоположные стороны (рис. 3.33, а). Результирующий момент M = M1 + M2 (рис. 3.33, б).
Рис. 3.33. Представление двигателя с единой обмоткой (а), его момент (б) и механическая характеристика (в)
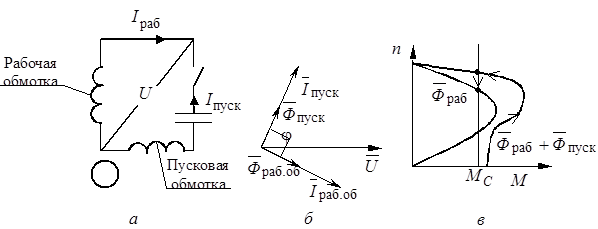
Двигатель c одной обмоткой не развивает пускового момента. Для запуска этот двигатель нужно сначала принудительно раскрутить. Схема однофазного асинхронного двигателя с пусковой обмоткойпредставлена на рис. 3.34.
Рис. 3.34. Схема включения обмотки АД (а), векторная диаграмма (б) и механическая характеристика двигателя (в)
в пусковой обмотке ёмкость подбирают так, чтобы угол Во время пуска пусковая обмотка подключена и создаётся вращающееся магнитное поле. После пуска пусковая обмотка отключается. Разновидностью являются конденсаторные двигатели, у которых пусковая обмотка не отключается.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|


 .
. .
.

 .
.

 и возникает тормозной момент.
и возникает тормозной момент. .
.
 .
.
 .
. , т.е. пульсирующий по синусоидальному закону магнитный поток, создаваемый одной катушкой, можно разложить на два вращающихся в противоположные стороны магнитных потока.
, т.е. пульсирующий по синусоидальному закону магнитный поток, создаваемый одной катушкой, можно разложить на два вращающихся в противоположные стороны магнитных потока.


 . Это необходимо для создания вращающегося магнитного поля.
. Это необходимо для создания вращающегося магнитного поля.