|
|
Преобразование комплексных чисел, аналитических выражений и функций комплексного переменного
Операции с комплексными числами: > restart: with(linalg): with(plots): > z::complex:# Объявлдение z - комплексным числом; > z:=3+4*I;
> Im(z);# Мнимая часть комплексного числа;
> Re(z);# Вещественная часть комплексного числа;
> abs(z);#Модуль комплексного числа;
> argument(z); # Аргумент комплексного числа;
> evalf(%);
> conjugate(z);# Сопряженное комплексному числу;
> AA:=polar(z);# Тригонометрическая форма комплексного числа;
> exp(z);# Экспонента комплексного числа;
> A:=evalf(evalc(exp(z)));
> Re(A);
> Im(A);
Функции комплексного переменного: > restart:with(plots): Warning, the name changecoords has been redefined
> w,p::complex:
> w:=(p)->(1+p^4)/(1+2*p+p^3);
> p:=I*omega;
> complexplot(w(p),omega=0..10,thickness=2);
> # Построение в (Re w, Im w) годографа: > restart: with(plots): Warning, the name changecoords has been redefined
> w:=(1+0.1*p)/(1+0.01*p^2+p^3);p:=I*omega:
> complexplot(w,omega=0..100,color=black,thickness=2);
> restart: > p:=I*omega;
> w:=(1+0.1*p+p^2)/(1+0.01*p^2+p^3);
Ø plot([Re(w),Im(w),omega=0..100],thickness=2); Ø
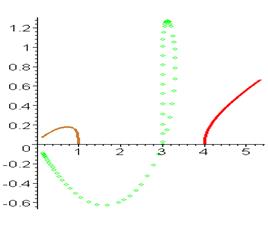
> restart: with(plots): > u,v,w,p::complex: > p:=I*omega;
> u:=(4+0.1*p)/(1+0.01*p^2);
> v:=(3+p)/(1+0.01*p^5);
> w:=(1+0.1*p)/(1+0.01*p^4);
> complexplot([u,v,w],omega=0..5,color=[RED,GREEN,GOLD],style=[line,point,line], thickness=3);
Преобразование комплексных выражений: > restart: > p:=I*omega;
> w:=(a[1]+a[2]*p+a[3]*exp(p*tau)*p^2+a[4]*p^5)/(b[1]+b[2]*p^2+b[3]*p^3);
> simplify(evalf(evalc(w)));
> simplify(evalf(evalc(conjugate(w))));# Сопряженное от w;
>
> evalf(evalc(Re(w)));
> evalf(evalc(Im(w)));
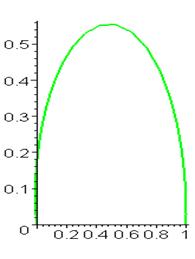
> Работа с комплексными функциями > > # Найти образ единичной окружности комплексной плоскости z(t)=exp(I*t) c помощью преобразования w(t)=(z(t)-0.5*z(Pi/4))/(1-0.5*z(-Pi/4)*z(t)); > restart; > z(t),w(t)::complex;
> z:=(t)->exp(I*t);
>evalc(Re(z(t))),evalc(Im(z(t))),t=0..2*Pi],thickness=2);
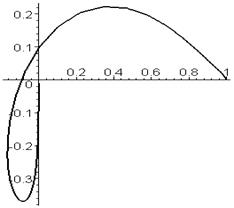
> w:=(t)->(z(t)-0.5*z(Pi/4))/(1-0.5*z(-Pi/4)*z(t));
> w(t):=simplify(evalc(w(t)));
> wRe(t):=simplify(evalc(Re(w(t))));
> wIm(t):=simplify(evalc(Im(w(t))));
Ø plot([wRe(t),wIm(t),t=0..2*Pi],thickness=2);
Таким образом, в настоящем разделе приведены пакеты функций системы аналитических вычислений Maple, способы задания функциональных зависимостей и способы построения их графиков, примеры вычисления пределов, производных и интегралов, операции с рядами, решение уравнений, неравенств и их систем, анализ функций, решения дифференциальных уравнений и их систем, операции с векторами и матрицами, преобразование комплексных чисел, выражений и функций комплексного переменного. В каждом случае приведены простейшие примеры, иллюстрирующие использования функций системы Maple. Приведенный в этом разделе набор функций. Этого набора функций достаточно для моделирования на ЭВМ конкретных динамических систем, рассматривавшихся авторами пособия в разное время. Примеры моделирования таких систем приведены в следующем разделе.
Примеры использования САВ Maple для решения прикладных задач
В настоящем разделе приведены примеры использования функций САВ Maple для решения конкретных задач: расчета показателей динамического качества электроприводов, расчета собственных и вынужденных колебаний автомобиля и изучение фазового портрета математического маятника.
Расчет показателей динамического качества Системы электропривода
Методы исследования динамики электропривода (ЭП) базируются на общих методах теории автоматического регулирования. Расчёт на ЭВМ показателей качества систем электроприводов является важным этапом в процессе их проектирования. Система электроприводов является сложной многоконтурной системой с несколькими цепями обратной связи. Поэтому актуальна задача создания программного и математического обеспечения расчёта показателей динамического качества исследуемых систем. Приведена обобщённая структурная схема электроприводов /7/. Для автоматизации получения главной передаточной функции и проведения расчетов используется система для аналитических вычислений Maple. Рассматривается аналитическое выражение главное передаточной функции, определяется расположение корней на комплексной плоскости, рассчитывается кривая переходного процесса и анализируются границы областей устойчивости в плоскостях различных параметров рассматриваемой динамической системы. Для расчета границ областей устойчивости используется корневой метод /6/. Анализ структурных схем электроприводов, используемых на металлорежущих станках с числовым программным управлением, показывает, что они имеют достаточно сложную, разветвлённую структуру с многочисленными обратными связями. На основе изучения наиболее типичных структурных схем электроприводов ЭТ6-С и ЭВ-3, применяемых в этих станках, была составлена обобщённая расчётная схема рис. 1.
Рис. 1.
Эта схема состоит из двух частей: собственно электропривода (ЭП) и двигателя (Д). Сигнал от устройства числового программного управления поступает на вход регулятора скорости (коэффициент передачи в изображении по Лапласу Регулятор тока усиливает эту разность и подает управляющее напряжение на схему формирования управляющих импульсов. По мере уменьшения рассогласования (под действием отрицательной обратной связи по частоте вращения) происходит стабилизация частоты вращения двигателя на уровне, пропорциональном напряжению задания. На рис. 1 Передаточные функции отдельных звеньев системы двигателя хорошо известны из теории автоматического регулирования /6/ и имеют вид:
где
где
Отличия в структурных схемах рассматриваемых приводов состоят в видах передаточных функций регуляторов скорости (
Такое задание Анализ структурной схемы (рис. 1) показывает, что главная передаточная функция системы может быть получена из следующих очевидных соотношений:
где Поскольку
Приведенные выше аналитические зависимости (1)–(9) положены в основу алгоритма и программы для расчета границ областей устойчивости системы электропривода. Алгоритм программы можно разбить на три основных этапа, которые состоят в следующем: 1. Задание передаточных функций отдельных звеньев ЭП и коэффициентов усиления в цепях обратной связи. 2. Получение главной передаточной функции. 3. Анализ корней характеристического уравнения на комплексной плоскости (Re, Im). 4. Расчет кривой переходного процесса. 5. Расчет границ областей устойчивости ЭП в плоскостях заданных параметров. На первом этапе, в процессы реализации этого алгоритма в виде программного обеспечения были заданы передаточные функции Входными данными разработанного программного обеспечения являются следующие: 1) коэффициенты полиномов передаточных функций [ 2) коэффициенты в передаточных функциях [ 3) коэффициенты усиления в цепях обратной связи: [ Программное обеспечение, реализующее описанный выше алгоритм, имеет вид:
Расчет показателей динамического качества электропривода ЭТ-6С > restart: with(linalg):with(plots):with(PolynomialTools):
> # Задание входных параметров; > # Передаточная функция регулятора скорости; > w[1]:=p->(a[1]+a[2]*p+a[3]*p^2+a[4]*p^3)/(b[1]+b[2]*p+b[3]*p^2+b[4]*p^3+b[5]*p^4);
> # Передаточная функция регулятора тока; > w[2]:=p->(c[1]+c[2]*p+c[3]*p^2+c[4]*p^3)/(s[1]+s[2]*p+s[3]*p^2+s[4]*p^3+s[5]*p^4);
> # Передаточная функция тиристорного преобразователя; > w[3]:=p->T[1]/(1+T[2]*p);
> # Передаточная функция цепи якоря двигателя; > w[4]:=p->T[3]/(1+T[4]*p);
> # Передаточная функция электродвигателя; > w[5]:=p->1/(T[5]*p);
> # Задание параметров функции регулятора скорости; > a[1]:=0.47: a[2]:=0.00564: a[3]:=0: a[4]:=0: > b[1]:=0: b[2]:=0.012: b[3]:=0: b[4]:=0: b[5]:=0: > > # Задание параметров функции регулятора тока; > c[1]:=7.3: c[2]:=0.121: c[3]:=0: c[4]:=0: > s[1]:=0.12: s[2]:=0.019228: s[3]:=0.000012342: s[4]:=0: s[5]:=0: > > # Задание параметров функции тиристорного преобразователя; > T[1]:=20.0: T[2]:=0.00167: > > # Задание параметров функции цепи якоря двигателя; > T[3]:=2.857: T[4]:=0.016: > > # Задание параметров функции электродвигателя; > T[5]:=0.057: T[4]:=0.016: > > # Задание коэффициентов в цепях обратной связи; > c[m]:=1.125: c[e]:=1.125: k[1]:=0.005: k[2]:=0.05: > > w[1](p);
> w[2](p);
> w[3](p);
> w[4](p);
> w[5](p);
> # Вычисление корней характеристического уравнения; > # Вычисление главной передаточной функции; > #w0:=(cm*w1*w2*w3*w4*w5)/(1+ce*cm*w4*w5+k1*w2*w3*w4+k2*cm*w1*w2*w3*w4*w5); #w0:=simplify(w0); > W := p -> ( c[m]*product(w[i](p), i = 1..5) )/( k[2]*c[m]*product(w[i](p), i = 1..5) + 1 + k[1]*product(w[i](p), i = 2..4) + c[e]*c[m]*w[4](p)*w[5](p)): W(p):=simplify(W(p));
> # Вычисление знаменателя и числителя главной передаточной функции; > den:=collect(denom(W(p)),p): > num:=collect(numer(W(p)),p): > den:=den; num:=num; st:=degree(den,p): r:=solve(den,p):
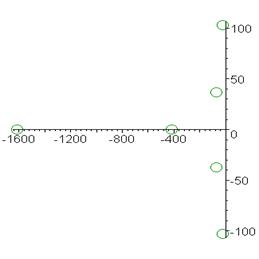
> delta:=Re(r[1]): for i from 2 to st do if (Re(r[i]) > delta) then delta:=Re(r[i]) end if end do: delta:=delta: n:=0: ni:=0: for i from 1 to st do if Im(r[i]) = 0 then n:=n+1: z[n]:=r[i] else ni:=ni+1: zi[ni]:=r[i] end if: end do:
> # Графическое отображение корней характеристического уравнения на комплексной плоскости (Re p,Im p); PLOT(POINTS([Re(r[1]),Im(r[1])],[Re(r[2]),Im(r[2])],[Re(r[3]),Im(r[3])],[Re(r[4]),Im(r[4])],[Re(r[5]),Im(r[5])],[Re(r[6]),Im(r[6])],SYMBOL(CIRCLE,30), COLOR(RGB,0,0.6,0)),POINTS([0,0],SYMBOL(CROSS,5)),COLOR(RGB,1,1,1));
> # РАСЧЕТ КРИВОЙ ПЕРЕХОДНОГО ПРОЦЕССА # Выделение коэффиентов главной передаточной функции и формирование системы шести диференциальных уравнений; > pa0:=coeff(den,p,6): pa1:=coeff(den,p,5): pa2:=coeff(den,p,4): pa3:=coeff(den,p,3): pa4:=coeff(den,p,2): pa5:=coeff(den,p,1): pa6:=coeff(den,p,0): pb0:=coeff(num,p,2): pb1:=coeff(num,p,1): pb2:=coeff(num,p,0): > sys:=diff(x1(t),t) = x2(t), diff(x2(t),t) = x3(t), diff(x3(t),t) = x4(t), diff(x4(t),t) = x5(t), diff(x5(t),t) = x6(t), diff(x6(t),t)=-pa1/pa0*x6(t)-pa2/pa0*x5(t)-pa3/pa0*x4(t)-pa4/pa0*x3(t)-pa5/pa0*x2(t)-pa6/ pa0*x1(t)+pb2/pa0;
> # Задание параметров для интегрирования системы дифференциальных уравнений по схеме Рунге-Кутта;
> d:=0: hint:=0.001: tint:=0.3: time0:=0: hk:=round((tint-time0)/hint): functions:={x1(t),x2(t),x3(t),x4(t),x5(t),x6(t)}: reshfr:=Array(0..hk,1..7): d:=time0: reshfr[0,1]:=time0: reshfr[0,2]:=0: reshfr[0,3]:=0: reshfr[0,4]:=0: reshfr[0,5]:=0: reshfr[0,6]:=pb0/pa0: reshfr[0,7]:=pb1/pa0-(pa1*pb0)/(pa0*pa0): > # Формирование цикла для вычисления кривой переходного процесса; > for shag from 1 to hk by 1 do nu:= x1(d)=reshfr[shag-1,2], x2(d)=reshfr[shag-1,3], x3(d)=reshfr[shag-1,4], x4(d)=reshfr[shag-1,5], x5(d)=reshfr[shag-1,6], x6(d)=reshfr[shag-1,7]; d:=d+hint: F:=dsolve({sys,nu},{x1(t),x2(t),x3(t),x4(t),x5(t),x6(t)},type=numeric); v:=subs(t=d,F(d)): reshfr[shag,1]:=d: reshfr[shag,2]:=(evalf(rhs(v[2]))): reshfr[shag,3]:=(evalf(rhs(v[3]))): reshfr[shag,4]:=(evalf(rhs(v[4]))): reshfr[shag,5]:=(evalf(rhs(v[5]))): reshfr[shag,6]:=(evalf(rhs(v[6]))): reshfr[shag,7]:=(evalf(rhs(v[7]))): end do: tim:=Array(1..hk): Ix:=Array(1..hk): for i from 1 to hk by 1 do tim[i]:=reshfr[i,1]: Ix[i]:=reshfr[i,2]:end do: > # Графическое отображение кривой переходного процесса; > coordXT:=zip((x,y)->[x,y],tim,Ix,2): pointplot(coordXT,labels=[t,x1],color=red,connect=true,thickness=3)
С помощью разработанного программного обеспечения был проведен многофакторный вычислительный эксперимент по расчету собственных колебаний с целью анализа кривой переходного процесса и определения границ областей устойчивости в плоскости конструктивных параметров электропривода ЭТ6-С. На первом этапе проводился вычислительный эксперимент по определению чувствительных параметров системы электропривода. Рассматривалось влияние отдельных параметров на изменение степени устойчивости На втором этапе проводился вычислительный эксперимент по определению границ устойчивости в плоскости чувствительных параметров. Анализ устойчивости проводился по расположению корней характеристического уравнения
Рис. 2.
Таким образом, в настоящем разделе дано решение задачи определения динамических характеристик собственных колебаний систем ЭП, приведены области устойчивости в плоскостях различных параметров на примере электропривода ЭТ6-С. В процессе исследования устойчивости был использован корневой метод, который в сочетании с программным обеспечением Maple позволил достичь необходимого результата. Разработанное программное обеспечение и результаты исследований могут быть использованы для определения областей устойчивости разного класса электроприводов, а также других динамических систем, имеющих структуру аналогичную исследуемой. Результаты исследований и программное обеспечение могут быть использованы при проектировании перспективных систем ЭП и для обучения студентов, специализирующихся в области прикладной математики.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|





















 plot([
plot([



 ,
,  ). При наличии рассогласования
). При наличии рассогласования  на входе регулятора скорости, на его выходе формируется сигнал пропорциональный этому рассогласованию, который, сравниваясь с текущим значением тока якоря, поступает на вход регулятора тока (
на входе регулятора скорости, на его выходе формируется сигнал пропорциональный этому рассогласованию, который, сравниваясь с текущим значением тока якоря, поступает на вход регулятора тока (  ).
). ,
,  и
и  передаточные функции тиристорного преобразователя, цепи якоря и двигателя,
передаточные функции тиристорного преобразователя, цепи якоря и двигателя,  ,
,  — коэффициенты усиления в цепи обратной связи контура тока и скорости;
— коэффициенты усиления в цепи обратной связи контура тока и скорости;  ,
,  — коэффициенты усиления по моменту и ЭДС.
— коэффициенты усиления по моменту и ЭДС.  ,
,  ,
,  , (2.1.1)
, (2.1.1) , (2.1.2)
, (2.1.2) , (2.1.3)
, (2.1.3) и
и  — коэффициент усиления и малая постоянная времени, соответственно, тиристорного преобразователя;
— коэффициент усиления и малая постоянная времени, соответственно, тиристорного преобразователя; , Ом^(–1) и
, Ом^(–1) и  , Гн/Ом,
, Гн/Ом, и
и  — индуктивность и сопротивление в цепи якоря двигателя,
— индуктивность и сопротивление в цепи якоря двигателя, — суммарный момент инерции ротора с приведенной инерционной нагрузкой.
— суммарный момент инерции ротора с приведенной инерционной нагрузкой. (2.1.4)
(2.1.4) . (2.1.5)
. (2.1.5) (2.1.6)
(2.1.6) (2.1.7)
(2.1.7) , (2.1.8)
, (2.1.8) — скорость вращения ротора двигателя.
— скорость вращения ротора двигателя. являются отношениями полиномов от p, то главная передаточная функция
являются отношениями полиномов от p, то главная передаточная функция  , согласно (2.1.1)–(2.1.8), также будет представлять собой отношение полиномов вида:
, согласно (2.1.1)–(2.1.8), также будет представлять собой отношение полиномов вида: . (2.1.9)
. (2.1.9) (14, 15):
(14, 15): ]=б/р, [
]=б/р, [  ]=c, [
]=c, [  ]=c
]=c  , [
, [  ]=c
]=c  , [
, [  ]=б/р, [
]=б/р, [  ]=с, [
]=с, [  ]=с
]=с  ]=с
]=с  ]=с
]=с  , [
, [  ]=б/р, [
]=б/р, [  ]=с, [
]=с, [  ]=с
]=с  ]=с
]=с  ]=б/р, [
]=б/р, [  ]=с, [
]=с, [  ]=с
]=с  ]=с
]=с  ]=с
]=с  ]=б/р, [
]=б/р, [  ]=c, [
]=c, [  ]=1/Ом, [
]=1/Ом, [  ]=Вс/А, [
]=Вс/А, [  ]=кг*м
]=кг*м  ]=Вс/рад, [
]=Вс/рад, [ 










 . При этом удалось выявить чувствительные параметры конструкции: коэффициенты усиления в цепях обратной связи и некоторые конструктивные параметры.
. При этом удалось выявить чувствительные параметры конструкции: коэффициенты усиления в цепях обратной связи и некоторые конструктивные параметры. на комплексной плоскости. Результаты расчета границ области устойчивости в плоскости параметров (
на комплексной плоскости. Результаты расчета границ области устойчивости в плоскости параметров (