|
|
Автоматизация и оптимизация технологических процессовФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ ВЯТСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ
Факультет автоматики и вычислительной техники Кафедра электропривода и автоматизации промышленных установок
Автоматизация и оптимизация технологических процессов Методические указания по лабораторному практикуму для студентов специальности 1804 – “Электропривод и автоматизация промышленных установок”.
Киров 2006
Печатается по решению редакционно-издательского совета Вятского государственного университета
УДК 621.906 А40
Составители: заведующий кафедрой электропривода и автоматики промышленных установок В.С. Хорошавин; преподаватель кафедры электропривода и автоматики промышленных установок Д.В. Пивоваров
Редактор Е.Г. Козвонина
Подписано в печать Усл.печ.л. Бумага офсетная Печать копир Aficio 1022 Заказ № Тираж 25 Бесплатно
Текст напечатан с оригинал-макета, предоставленного автором.
Оформление обложки, изготовление – ПРИП ВятГУ.
© Вятский государственный университет, 2006 ЛАБОРАТОРНАЯ РАБОТА №1
ИССЛЕДОВАНИЕ СИСТЕМЫ УПРАВЛЕНИЯ ПРОМЫШЛЕННЫМ РОБОТОМ РКТБ-1.
1. Цель работы. 1.1. Изучение возможностей промышленного робота РКТБ-1. 1.2. Изучение системы управления промышленным роботом РКТБ-1. . 1.3. Практическое овладение методикой программирования промышленного робота РКТБ-1. 2. Основные сведения к лаборатории ой работе. Промышленный робот РКТБ-1 грузоподъемностью 3 кг предназначен для комплексной автоматизации операций холодной штамповки. В лаборатории роботов КирПИ РКТБ-1 используется для сортировки по цвету цилиндрических заготовок. Манипулятор робота, оснащенный пневматическим исполнительным приводом, имеет четыре степени свободы: вертикальное и продольное перемещение руки, поворот руки вокруг вертикальной и горизонтальной осей. Рука робота имеет клещевой пневматический захват. Грузоподъемность робота 3 кг. Точность позиционирования ±0,5 мм. Управление манипулятором осуществляется от цикловой позиционной системы управления. В определенной последовательности (по программе, заданной на выносном наборном поле или запаянной на коммутирующем устройстве) выдаются команды на срабатывание соответствующих электропневмораспределителей, которые подают воздух в исполнительные пневмоцилиндры манипулятора. 3. Описание лабораторной работы. Промышленный робот РКТБ-1 состоит из манипулятора и блока управления, соединенных между собой жгутами. 3.1. Конструктивно манипулятор состоит из сварного каркаса с присоединенным к нему накопительным устройством и механической частью. В сварном каркасе монтируется элементы подготовки воздуха, распределительная панель и основные механические узлы. Схема пневматическая принципиальная РКТБ-1 приведена на рис. 1.
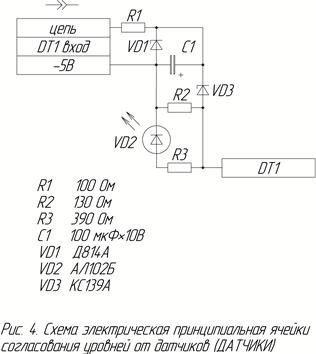
К элементам подготовки воздуха относятся пневмораспределитель, включающий и регулирующий подачу воздуха в магистраль (расположен в верхней левой лицевой части каркаса), влагоотделитель Ф, два ресивера PC1 и РС2, манометр М1, реле давления РД и маслораспылитель МР. Распределительная панель с установленными на ней электропневмораспределителями (электропневмоклапанами) P1...P5 и пневмодросселями ДР1...ДР9 расположена в тыльной части каркаса и крепится на оси, чем обеспечивается свободный доступ к регулируемым элементам при опрокидывании панели. Каждый электропневмораспределитель оснащен двумя электромагнитами. При подаче напряжения на один из электромагнитов электропневмораспределитель срабатывает и считается в таком положении при снятии напряжения с электромагнита. Для возврата электропневмораспределителя в исходное положение необходимо кратковременно подать напряжение на другой электромагнит. В состав механической части входят: а) пневмоцилиндр вертикального перемещения Ц1, расположенный в линейной части каркаса; б) механизм поворота, состоящий из двух пневмоцилиндров Ц2,ЦЗ, установленных на одном корпусе, расположенный в верхней части каркаса. Штоки пневмоцилиндров поворота выполнены в виде зубчатых реек и находятся в зацеплении с зубчатым колесом колонны. Колонна передает вращение и вертикальное перемещение на механизм горизонтального перемещения (рука манипулятора), который устанавливается на верхний фланец колонны; в) узел горизонтального перемещения состоит из пневмоцилиндра выдвижения руки Ц5, в заднюю крынку которого встроены два цилиндра ротации Ц4; г) захват клещевого типа крепится на торце штока цилиндра руки к поворотному фланцу, зажим захвата осуществляется при подаче воздуха в цилиндр захвата Ц5 по телескопическим трубкам, встроенным в шток, а разжим - под действием пружины. В механизмах всех четырех степеней свободы предусмотрена возможность регулировки величины хода резьбовыми ограничителями движения. Для безударного останова исполнительных органов предусмотрены тормозные устройства (пневматические демпферы) ПД, которые настраиваются совместно с настройкой пневмодросселей, используемых для регулирования скорости подвижных элементов робота. 3.2. Блок управления типа КПМ 3.553.007 предназначен для управления манипулятором по жесткому циклу. 3.2.1. Технические характеристики. 1) Питание блока – от однофазной сети 220Б. 2) Потребляемый от сети ток – не более 0,5А. 3) Программоноситель – выносное наборное поле в виде штекерного коммутатора или ячейка ПРОГРАММА, на которой распаяна одна из возможных жестких программ. 4) Максимальное количество шагов в программе - 24. 5) Количество команд (в том числе и вспомогательные) – 18. Каждой команде соответствует свой тиристорный ключ в одной из трех ячеек КЛЮЧИ. При срабатывании тиристорного ключа подается напряжение на электромагнит одного из электропневмораспределителей. 6) Время задержки между командами 0,1–1 с. 7) Тип подключенных датчиков БК-А-5-0. 8) Характеристики выходных тиристорных ключей: коммутируемый ток до 1A, коммутируемое напряжение до 220В переменного тока. 9) Используемая элементная база – микросхемы серии 155. 3.2. Блок управления Конструктивно блок управления состоит из унифицированного корпуса настольного типа, в который вставляются 7 ячеек: ячейка управления (T1,T2), ячейка с наборной программой (ПРОГРАММА),ячейка с распределителем импульсов (ШАГИ), ячейка согласования уровней от датчиков (ДАТЧИКИ) и 3 ячейки с тиристорными ключами (КЛЮЧИ), схемы ячеек изображены на рис. 2,3,4,5. Включение блока осуществляется тумблером СЕТЬ. Включение источника напряжения для электромагнитов электропневмораспределителей осуществляется тумблером ПРИВОД. В пневмосистеме манипулятора установлен датчик давления, при уменьшении давления загорается лампочка ДАВЛЕНИЕ. 3.2.1. Работа блока в ручном режиме. Нажатием кнопки РУЧ. осуществляется отключение распределителя импульсов. Нужная команда задается одновременным нажатием кнопки ЯЧЕЙКИ и кнопки КВ.КЧИ с левой стороны блока. При этом срабатывает ключ и подключает выбранный электромагнит. 3.2.2. Порядок задания команд. Последовательность выполнения команд программы задается перемычками в ячейке ПРОГРАММА. Перемычки соединяют контакты, обозначающие номер шага, с контактами, обозначающими команды, которые должны быть исполнены на этом шаге. Переход на первый шаг задается командой ЦИКЛ. Не допускается выполнение двух команд на одном шаге. В соответствии с заданным исходным положением необходимо соединять перемычками контакты с нужными командами с контактами ИСХ на наборном поле, таких перемычек должно быть пять – по количеству команд, однозначно определяющих положение схвата. При создании программы необходимо следить, чтобы положение схвата манипулятора при команде ЦИКЛ совпадало с исходными положениями. Для исключения ложных сбрасываний ключей и обеспечения однозначной индикации шага в качестве перемычек рекомендуется использовать германиевые диоды. На наборном поле германиевые диоды уже вмонтированы и соединены по схеме ИЛИ.
3.2.3. Работа в автоматическом режиме. После нажатия на кнопку ПУСК с распределителя импульсов поступает сигнал ШАГИ на ячейку с программой. Далее сигнал подается на одну из ячеек КЛЮЧИ и ячейку управления. При поступлении сигнала с внешнего датчика о выполнении команды, этот сигнал через ячейку согласования уровней от датчиков поступает на ячейку управления, где формируется сигнал перевода распределителя импульсов на следующий шаг (команда ПЕРЕХОД). При поступлении команды, выполнение которой не должно подтверждаться с датчиков сигналом, переход на следующий шаг осуществляется этой же командой. В РКТБ-1 командами, не подтверждаемыми датчиками, являются зажим и разжим схвата и команды на ротацию схвата. При поступлении команды ЗАДЕРЖКА сигнал перехода формируется через время Т2 (время Т2 можно регулировать). В ячейке управления осуществляется задержка сигнала на время T1 для каждого шага ( T1 можно регулировать). При поступлении в ячейку управления команды ЦИКЛ формируется сигнал перехода распределителя импульсов на шаг 1. Кнопка ПРЕР.ЦИКЛА позволяет блокировать переход на следующий шаг. При поступлении на блок управления сигнала с внешнего аварийного датчика или при нажатии кнопки АВАР.СТОП автоматически блокируется переход на следующий шаг, загорается лампочка “АВАРИЯ”,отключается напряжение от исполнительных электромагнитов. Нажатием кнопки ИСХ осуществляется перевод распределителя импульсов в исходное состояние (сигнал на выходе отсутствует) и подача сигналов включения на ключи, заданные программой (пять ключей). После нажатия кнопки ПУСК через время, равное сумме T1 и Т2, осуществляется перевод распределителя импульсов на ШАГ 1. 3.3. В лаборатории роботов промышленный робот РКТБ-1 оснащен фотодатчиком для определения цвета заготовок, находящихся в зоне выдачи. Сигнал фотодатчика используется для сортировки заготовок по цвету. Сортировка может быть осуществлена, например, за счет запрета выдвижения руки при наличии в схвате заготовки белого цвета. В связи с тем, что в момент сортировки заготовка находится не в тоне фотодатчика, в блок управления введена добавочная команда “ОПРЕДЕЛЕНИЕ ЦВЕТА”. Контакт, соответствующий этой команде необходимо соединить с контактом того шага, на котором заготовка находится ещё в зоне фотодатчика. Запрет выдвижения руки осуществляется за счет соединения контакта шага, на котором должна быть выполнена команда выдвижения, с контактом ключа, соответствующего команде выдвижения, через нормально замкнутые контакты фотореле. При этом контакт указанного шага должен быть соединен также с командой ЗАДЕРЖКА через нормально открытые контакты фотореле. Контакты “ОПРЕДЕЛЕНИЕ ЦВЕТА” и перекидные контакты фотореле выведены в нижний левый угол наборного поля.
4. Порядок проведения лабораторной работы. 4.1. Изучение работы промышленного робота в ручном режиме. Ручной режим работы РКТБ-1 используется для настройки ограничителей хода механизмов манипулятора, для настройки скорости передвижения элементов робота, настройки пневмодемпферов и для определения соответствия ключей командам. Для ликвидации аварийных ситуаций при неправильном наборе программы ограничитель выдвижения руки устанавливается вначале в, положение, при котором захват не доходит до накопителя. После проверки правильности функционирования робота в автоматическом режиме ограничитель выдвижения руки настраивается до нужного положения. Порядок работы в ручном режиме. 4.1.1. Установить ограничители выдвижения руки в положение, где захват не доходит до накопителя. 4.1.2. Кнопку РУЧ (с фиксацией) установить в нажатом положении. 4.1.3. Включить тумблер СЕТЬ. 4.1.4. После того, как загорится лампочка 5В включить тумблер ПРИВОД. 4.1.5. Нажатием кнопок ЯЧЕЙКА, КЛЮЧИ включать ключи 1.1…2.4 и определить выполняемые команды при срабатывании ключей. Данная часть работы необходима для составления программы и её набора на наборном поле. Для удобства результаты свести в таблицу 1.
Таблица 1.
4.1.6. При необходимости настраивать ограничители хода остальных исполнительных органов манипулятора. 4.1.7. При необходимости отрегулировать скорости, исполнительных органов манипулятора и настроить пневматические демпферы. 4.2. Изучение работы промышленного робота в автоматическом режиме. Для исследования робота РКТБ-1 в автоматическом режиме студенты предварительно набирают на наборном поле программу, алгоритм которой задается преподавателем на занятии. Для удобства проверки программы и коммутации на наборном поле программа записывается в виде таблицы 2.
Таблица 2.
Столбец “датчик” используется при проверке работы системы управления. Порядок работы в автоматическом режиме, 4.2.1. Подключить ячейку с наборным полем на место эталонной ячейки ПРОГРАММА. 4.2.2. Включить тумблер СЕТЬ. 4.2.3. Нажать кнопку РУЧН, если она предварительно не нажата. 4.2.4. Включить тумблер ПРИВОД. 4.2.5. Нажать и отпустить кнопку ИСХ, при этом на ячейке ПРОГРАММА должен включиться светодиод ИСХ, в противном случае нажать повторно. При этом манипулятор должен установиться в исходное положение, определяется программой. 4.2.6. Отжать кнопку РУЧН (отжимается при повторном нажатии). 4.2.7. Нажать кнопку ПУСК, отпустить которую надо в момент начала движения манипулятора по заданной программе. При необходимости прервать цикл работы на любом шаге нужно во время этого шага нажать кнопку ПРЕР.ЦИКЛА. При возникновении аварийной ситуации необходимо нажать кнопку АВАР.СТОП. При этом цикл работы автоматически прерывается и снимается напряжение с исполнительных механизмов (одновременно включается ключ 3.6, который можно использовать для внешней аварийной ситуации). 4.2.8. После проверки правильности работа робота в автоматическом режиме допускается после отключения напряжения питания настроить ограничитель выдвижения руки до положения, при котором захват входит в окно накопителя для взятия заготовки. 5. Содержание отчета. Отчет по работе должен содержать: 1. Заполненную схему таблицы 1. 2. Заполненную схему таблицы 2. 3. Письменный ответ на один из вопросов (по заданию преподавателя). 6. Контрольные вопросы. 1. Как осуществляется ручное управление манипулятором? 2. Как осуществляется автоматическое управление манипулятором? 3. Назначение диодов на наборном поле. 4. Поясните работу распределителя импульсов. 5. Поясните работу тиристорного ключа. 6. Поясните работу ячейки согласования уровней от датчиков. 7. Каким образом изменить ход манипулятора на каждой координате? 8. Предложите вариант схемы фотореле с блоками управления для реализации сортировки заготовок по цвету. 9. Поясните работу ячейки управления при отработке роботом команды, подтверждаемой датчиками. 10. Поясните работу ячейки управления при отработке роботом команды, не подтверждаемой датчиками. 11. Поясните работу ячейки управления при отработке роботом команды ЗАДЕРЖКА. 12. Почему на последнем по программе шаге робот должен находиться в положении, соответствующем команде ИСХОДНОЕ? ЛАБОРАТОРНАЯ РАБОТА 2. ИССЛЕДОВАНИЕ СИСТЕМЫ ЛОГИЧЕСКОГО УПРАВЛЕНИЯ ЛИФТОМ.
1. Цель работы – изучение работы бесконтактной логической системы управления пассажирским лифтом, построенной на цифровых интегральных микросхемах 511 серии. 2. Программа работы. 2.1. Ознакомиться с устройством лабораторного макета лифта и изучить содержательное описание алгоритма функционирования лифта. 2.2. Изучить математическое описание алгоритмов управления лифтом для различных узлов системы управления. 2.3. Изучить принципиальную схему системы управления. 2.4. По заданному преподавателем узлу системы управления записать алгоритм его функционирования в заданной преподавателем форме (таблица переходов, циклограмма, микропрограммный автомат), получить математическое описание алгоритма управления этого узла, составить функциональную схему реализации алгоритма управления на микросхемах 511 серии. 3. Описание лабораторной установки. Внешний вид макета лифта с расположением датчиков и пульта управления показан на рис. 1.
3.1. Содержательное описание алгоритма функционирования лифта. Управление движением кабины лифта может осуществляться как вне кабины с этажей с помощью кнопок вызовов, так и внутри кабины от кнопок приказов, на каждом этаже, кроме первого и пятого, имеется по две кнопки вызовов: “вызов для движения вверх” и “вызов для движения вниз”. На первом этаже имеется только одна кнопка “вызов для движения вверх”, а на пятом этаже - одна кнопка “вызов для движения вниз”. Вызовы и приказы должны запоминаться и снимаются после полной отработки вызова или приказа При движении кабины вверх лифт должен отрабатывать как приказы, так и вызовы для движения вверх по пути движения кабины. При наличии вызовов для движения вниз, поступивших с этажей, расположенных выше кабины лифта, кабина должна двигаться вверх до этажа максимально высокого, откуда поступил вызов для движения вниз. Аналогично лифт должен работать при движении вниз. При нормальной работе лифта и остановке на заданном этаже дверь кабины должна открываться автоматически. Кабина остается открытой на время Δt, необходимое для выхода и входа пассажиров, затем автоматически закрывается, движение кабины возможно только при закрытой двери. При отсутствии приказов и вызовов кабина стоит на этаже последнего приказа или вызова с закрытой дверью. При нажатии кнопки вызова с этажа, где стоит кабина, дверь кабины автоматически открывается. При нажатии кнопки “Стоп” во время движения кабины лифт должен остановиться на ближайшем по направлению движения этаже, двери при достижении этого этажа открываются. Привод перемещения кабины лифта и дверей выполнен на асинхронных реверсивных электродвигателях типа РД-0,9-А. 3.2. Математическое описание автоматизируемого объекта. Входные, выходные и промежуточные переменные системы управления приведены в таблице 1, а их расположение на макете лифта и пульте управления дано на рис. 1.
Таблица 1.
На основании содержательного описания, выбранных входных и выходных сигналов и состояний элементов памяти составляется математическое описание алгоритма управления автоматизируемого объекта. На схеме управления лифтом можно выделить четыре узла с соответствующими математическими моделями: для узла определения положения кабины:
для узла приказов и вызовов:
для узла управления движением кабины:
для узла управления дверями кабины:
Функциональная схема устройства приведена на рис. 2. 3.3. Реализация системы управления лифтом. В качестве элементной базы для реализации применены цифровые интегральные микросхемы серии 511, предназначенной для устройств промышленной автоматики. Принципиальная схема системы управления лифтом показана на лабораторном стенде. Датчиками положения кабины служат герметизированные контакты типа КЭМ-2А, датчики положения дверей кабины – микропереключатели типа КмДП-1, кнопки приказов и вызовов выполнены на переключателях типа П2К. Для индикации положения кабины используются неоновые лампы ТH-0,2-2. Коммутация питания исполнительных двигателей перемещения кабины и дверей производится реле типа РЭС-6, включенных на выход индикаторных элементов с открытым коллектором К511ЛИ1 с током нагрузки до 100 мА. Задержка по времени сигнала K2 выполнена на формирователе длительности импульса, состоят из микросхем D29.3, D29.4, D 33.3, резисторов R29, R30, диоде VD17 и конденсаторе С6. При появлении единичного сигнала на выходе элемента D29.3 конденсатор С6 заряжается через резистор R29, диод VD17 при этом закрыт. Для R29=100 кОм, R30=1 кОм удельная задержка равна 0,07÷0,08 с/С(мкФ); если принять задержку времени 8 с, то C6=100 мкФ.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 610000, г. Киров, ул. Московская, 36.
610000, г. Киров, ул. Московская, 36.