
|
|
Оптимизация движения кабины пассажирского лифта
Движение кабины пассажирского лифта происходит по оптимальному закону, если лифт обеспечивает максимальную производительность при соблюдении необходимых условий комфортности, минимум первоначальных и эксплуатационных расходов и имеет ограниченную по максимуму скорость движения кабины. В этом случае оптимальная диаграмма движения кабины имеет одинаковые по длительности интервалы пуска и замедления, в течение которых ускорение и рывок скорости не превышают максимально допустимых значений, и интервал равномерного движения, в течение которого скорость движения кабины не превышает максимального значения.
Оптимальную диаграмму движения кабины лифта (рис.4.2). В интервалах пуска и замедления рывок скорости изменяется скачкообразно на участках. Ускорение, а изменяется по трапецеидальному закону на участках и Скорость имеет параболические участки при изменении ускорения движения. Рассмотренная диаграмма является оптимальной, если переходные процессы удается осуществить за минимально возможное время, так как на всех стадиях переходного процесса там, где это, возможно, поддерживаются постоянными предельно допустимые значения рывков и ускорений. Однако на практике в точности реализовать такой график движения трудно. При проектировании электропривода подъемных устройств важной задачей является их точная остановка против заданного уровня. Неточная остановка пассажирских подъемников увеличивает время входа и выхода пассажиров, грузовых — затрудняет, а в некоторых случаях делает невозможной разгрузку кабины. Если при ручном управлении лифтом и шахтными подъемниками кабина при торможении по тем или иным причинам не остановилась против заданного уровня, то ее доводка может быть произведена оператором путем повторного включения двигателя. В этом случае непосредственно к системе электропривода каких-либо специальных требований в отношении точной остановки не предъявляется. При автоматизации подъемной установки управление всеми элементами рабочего процесса и, в частности, процессом остановки полностью осуществляет электропривод. В связи с этим к нему предъявляются жесткие требования в отношении точной остановки, которые в ряде случаев оказывают решающее влияние на выбор той или иной системы электропривода. Рассмотрим схему остановки кабины лифта. При подходе кабины лифта к этажной площадке установленный на ней упор. В воздействует на датчик точной остановки А, который может быть выполнен в различных конструктивных вариантах. После срабатывания датчика кабина продолжает следовать с постоянной скоростью Vн, пока не сработают аппараты, дающие импульс на отключение двигателя и наложение механического тормоза. Путь, пройденный кабиной при этой скорости:
Далее начинается торможение кабины, за время которого она проходит путь S". Следовательно.
где FT; FC — соответственно тормозное и статическое усилия, приведенные к скорости движения кабины, Н; т — приведенная к скорости движения кабины масса всех движущихся частей подъемника, кг. Отсюда
Путь, пройденный кабиной с момента воздействия на датчик точной остановки до полной остановки:
где Fдип - суммарное усилие, Fдип = Fc + FT. Неточность остановки возникает вследствие того, что в процессе работы все величины, от которых зависит S", изменяются в широких пределах. Масса m и статическое усилие Fс зависят от загрузки кабины. Значение скорости VH определяется жесткостью механической характеристики электропривода и значениями усилия Fс. Наконец, время и усилие тормоза FT могут меняться в зависимости от случайных факторов. Каждая из указанных величин может изменяться в пределах х = х0± Ах, где х0 — среднее значение, а Ах — наибольшее возможное отклонение переменной х от среднего значения: Следует, что наиболее эффективным способом снижения неточности остановки является уменьшение средней начальной скорости, с которой кабина подходит к датчику; точной остановки. Для получения заданной точности остановки при больших рабочих скоростях подъемников необходимо перед остановкой заблаговременно снизить скорость до значения Vдоп при котором неточность остановки ΔSmах не превышает допустимую. Таким образом, требование точной остановки определяет диапазон регулирования скорости, который должен обеспечивать: электропривод автоматизированного подъемника при заданно допустимой неточности SДОП .
Требования к электроприводу лифта
Лифт должен быть надежным в работе, обеспечивать безопасность при пользовании пассажирами и малошумность (для лифтов используют специальные электродвигатели с пониженным уровнем шума), а также удобство и простоту в эксплуатации и обслуживании. Система электропривода должна ограничивать ускорения кабины (по условиям комфортности для пассажирских лифтов и отсутствия проскальзывания каната относительно канатоведущего шкива для грузовых). Она также должна обеспечивать плавные переходные процессы при пуске и торможении в широких пределах изменения момента сопротивления. Напомним, что зависимости скорости, ускорения и рывка для кабины лифта построены с учетом ограничения ускорений и рывков на допустимом уровне. Для лифтов с основной рейсовой скоростью более 0,71 м/с должна быть предусмотрена ревизионная пониженная скорость Vрев<0,36 м/с. Электропривод лифта должен обеспечивать точную остановку кабины относительно уровня этажной площадки (10 ... 20 мм для скоростных и больничных лифтов, 35 ... 50 мм для остальных). Для лифтов с номинальной скоростью кабины не выше 1,4 м/с указанные ревизионная скорость и точность остановки реализуются созданием механической характеристики электропривода лифта при пониженной скорости. Лифтовая лебедка должна быть оборудована автоматически действующим тормозом. Для качественного выполнения операций по транспортировке пассажиров и грузов ЭП лифтов должен обеспечить: - реверсивную работу двигателя - плавный пуск и торможение при условии чтобы ускорение и замедление, а также их производные не превышали установленные нормы. - минимальное время переходных процессов. - точную остановку кабины на уровне пола этажа - скорость кабины лифта в режиме развоза должна быть не более 0,3 м/с Схема управления лифтом должна удовлетворять следующим требованиям: - обеспечивать эксплуатационные режимы работы при управлении из кабины, при управлении из машинного зала, при вызове кабины на этаж. - исключить пуск лифта при открытых дверях кабины и шахты. - обеспечить безопасную работу лифта и остановку при любых видах аварий - при срабатывании пожарной сигнализации обеспечить автоматическое опускание кабины на 1- ый этаж и открывание дверей. Наряду с указанными, к лифтам предъявляются следующие дополнительные требования: точность остановки относительно уровня этажной площадки; плавность движения кабины при разгоне и торможении; комфортабельность условий транспортирования пассажиров; общедоступность пользования лифтом; бесшумность работы; допустимый уровень электромагнитных помех при работе систем радиосвязи и телевидения. Основными частями лифта являются: лебедка, кабина, противовес, направляющие для кабины и противовеса, двери шахты, ограничитель скорости, тяговые канаты и канат ограничителя скорости, узлы и детали приямка, электрооборудование и электроразводка.
4.4. Системы электроприводов лифта
Для лифтов применяются различные системы электроприводов в зависимости от номинальной рабочей скорости, требуемой точности остановки кабины, необходимой плавности работы при разгоне и торможении, стоимости изготовления и эксплуатации. Чаще всего для лифтов используют электроприводы переменного тока с одно- и двухскоростными короткозамкнутыми асинхронными двигателями и электроприводы постоянного тока с управляемыми преобразователями. Каждая схема управления лифтом включает в себя набор блоков, предназначенных для выполнения определенных операций (рис. 4.3). Команда для начала движения лифта подается с помощью устройства приказов и вызовов, в качестве которого обычно используются кнопки управления, кнопочные посты и кнопочные панели.
Рис. 4.3. Структурная схема лифтовой установки
Команда от устройства приказов и вызовов поступает в узел который осуществляет запоминание и последующее снятие соответствующих команд после их выполнения. Схемное решение этого узла зависит от очередности выполнения вызовов кабины и с типа элементов, применяемых в качестве запоминающих устройств (залипающие кнопки, одно- и двухобмоточные электромагнитные реле и бесконтактные элементы). Наиболее сложным и ответственным узлом схемы управления лифтовой установки является позиционно-согласующее устройство (ПСУ), которое служит для определения пол ожени кабины в шахте и выдачи сигналов для движения кабины нужном направлении и ее остановки. Конструктивно ПСУ выполняют в виде набора электромеханических переключателей, размещенных в шахте или смонтированных в специальных приборах копираппарате или селекторе, которые находятся в машинном помещении и связаны с кабиной механической или электрической связью.
К простейшему типу селектора относится размещаемый в шахте на уровне каждого этажа трехпозиционный перекидной этажный переключатель (ЭП), переключаемый с помощью специальной скобы (отводки), укрепленной на кабине. Положение переключающего рычага ЭП указывает на местоположение кабины (рис. 5). При прохождении кабины через этаж скоба перекидывает рычаг ЭП и переключает его контакты, которые выполняют соответствующее управляющее действие в схеме. Длина линейного участка скобы рассчитывается из условия двойного пути торможения лифта, поскольку ЭП переключаемся одной и той же скобой при подходе кабины к этажу как снизу, так и сверху. Узел автоматического выбора направления с помощью этажных переключателей показан на рис. 6 Кроме этажных переключателей в узел входят этажные реле ЭР, контакторы направления движения вверх КБ или вниз КН, включающие двигатель на соответствующее направление вращения, а также блокирующие контакты пола кабины ПК1, ПК2. Кабина находится на 1-м этаже, контакторы КВ и КН отключены. При нажатии на кнопку вызова КнВК приказа КнПК какого-либо, например, 1с-то этажа, получает питание реле ЭР К этого этажа. Контакт ЭРК подает питание на шину ШВ контактора КВ, если этаж назначения и вызова выше 1-го этажа, или на шину ШН контактора КН, если выбран этаж ниже 1-го. Кнопки КнВК Кн блокируются контактом ЭРК» одним из замкнувшихся контактов КВ КН. Если в кабине находится пассажир, то контакт пола ПК1 разрывает цепь вызывных кнопок, а контакт ЛА7 подключает цепь питания кнопок приказов. Преимуществом этажного переключателя является простота схем управления, построенных с его использованием. Однако срок службы его ограничен, он резко уменьшается с ростом скорости движения лифта, поэтому этажные переключатели применяются в основном на тихоходных и некоторых быстроходных лифтах с рабочими скоростями до 0,71 м/с. Расширить возможности путевого принципа контроля положения кабины можно с помощью копировальных аппаратов — механических селекторов, широко применяемых зарубежной практике. размещенный в машинном зале копировальный аппарат механически соединен с кабиной цепью или тросиком и в масштабе примерно 1 : 50 повторяет движение кабины в круговой развертке, выполняя с помощью кулачковых контактов те же операции переключения, что и этажные переключатели.
После остановки кабины автоматически включается электропривод дверей кабины и шахты. В лифтах с ручным управлением дверей этот узел отсутствует. Узел защиты и блокировки обеспечивает безопасность работы лифта. Этот узел исключает возможность движения кабины при открытых или незаблокированных замками дверях, а также открывание дверей шахты при отсутствии кабины на данном этаже, осуществляет остановку кабины при обрыве контактов, превышении допустимой скорости, нажатии аварийной кнопки «Стоп» и срабатывании защиты.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|
 Рис.4.2. Оптимальная диаграмма движения кабины
Рис.4.2. Оптимальная диаграмма движения кабины
 (4.1)
(4.1) (4.2)
(4.2) (4.3)
(4.3) (4.4)
(4.4)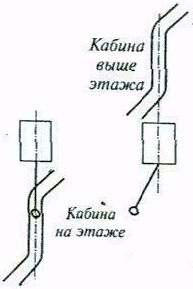
 Копировальные аппараты работают плавно и бесшумно, они применяются на лифтах со скоростью движения кабины до 1 м/с. При более высоких скоростях они работают ненадежно. Для скоростных и работающих е интенсивном режиме быстроходных лифтов применяются электрические селекторы с бесконтактными датчиками положения кабины. Наибольшее применение в схемах отечественных лифтов получили индуктивные датчики положения, принцип действия которых рассмотрен в гл. 2.
Копировальные аппараты работают плавно и бесшумно, они применяются на лифтах со скоростью движения кабины до 1 м/с. При более высоких скоростях они работают ненадежно. Для скоростных и работающих е интенсивном режиме быстроходных лифтов применяются электрические селекторы с бесконтактными датчиками положения кабины. Наибольшее применение в схемах отечественных лифтов получили индуктивные датчики положения, принцип действия которых рассмотрен в гл. 2.