|
|
Структура микроконтроллера.Общая классификация микропроцессорных средств . Микропроцессоры с аппаратным принципом управления характеризуются фиксированной разрядностью шин адреса и данных и неизменяемой системой команд. Последняя характеристика подразумевает, что набор возможных элементарных действий процессора образует конечное фиксированное множество, причем каждому действию соответствует конкретный управляющий код - код команды. Указанное свойство определяется тем, что в состав процессора входит блокдешифрации команд, функционирующий по жесткой аппаратной логике. Микропроцессорный комплект (МПК) - набор СБИС и БИС с общими конструктивно-технологическими принципами и электрическими характеристиками (уровни сигналов, быстродействие), предназначенных для построения функционально полнофункциональной микропроцессорной системы (МПС) для задач вычислений или управления. В состав МПК входят собственно центральный процессор (ЦП), или микропроцессор, арифметический сопроцессор - средство эффективной реализации вычислительных действий под управлением ЦП, а также контроллеры периферийных функций с программной настройкой режимов: порты параллельной и последовательной связи, таймеры - средства реализации временных интервалов, контроллеры прерываний и прямого доступа к памяти.Микросхемы ПЗУ и ОЗУ не входят в состав МПК и образуют самостоятельные функциональные группы.
Функциональная классификация микропроцессоров. · Классификация микропроцессоров по числу больших интегральных схем. · Классификация микропроцессоров по назначению. · Классификация микропроцессоров по виду обрабатываемых сигналов. · Классификация микропроцессоров по характеру временной организации. · Классификация микропроцессоров по организации структуры. · Классификация микропроцессоров по количеству выполняемых программ. Промышленные компьютеры. Промышленный компьютер — компьютер, в аспекте технического средства предназначенного для обеспечения работы программных средств в промышленном производственном процессе на предприятии: например АСУ ТП в рамках автоматизации технологических процессов. Первым промышленным компьютером принято считать выпущенный в 1984 году IBM 5531 IndustrialComputer. Промышленный компьютер — универсальный термин который может обозначать любой компьютер, не обязательно IBM PC-совместимый, не обязательно с архитектурой x86 и не обязательно адаптированный к неблагоприятным условиям. Его характеристики определяются потребностями конкретной задачи и конкретного заказчика. Промышленный ПК является частным, но наиболее распространенным видом промышленных компьютеров, являясь более сложным решением по сравнению с программируемым контроллером или встраиваемыми системами. Область применения: · Применяется в составе управляющих, контролирующих и измерительных комплексов в промышленности; · для создания систем SCADA управленчески взаимодействует с ПЛК; · в качестве составных частей диагностических комплексов в медицине; · в качестве аппаратной платформы для реализации визуализации и человеко-машинного интерфейса (например в информационных и платежных терминалах). Структура микроконтроллера. Микроконтроллер представляет собой вычислительную систему, реализованную в виде одной интегральной схемы, и включает следующие основные блоки: ядро, память программ и память данных, периферийные устройства.
Ядро микроконтроллера реализует процесс управления, задаваемый программой. На базе микроконтроллерного ядра фирмами-производителями интегральных схем разрабатываются изделия, различные по номенклатуре модулей памяти и периферийных устройств, но совместимые между собой по системе команд и циклам обмена данными. Множество совместимых по этому признаку МК носит название семейства микроконтроллеров. Память программ предназначена для хранения управляющих программ. Необходимые для процесса управления данные располагаются в памяти данных. Периферийные устройства предназначены для обеспечения сопряжения МК с внешними объектами и аппаратной реализации ряда управляющих функций. Микроконтроллеры, как и вычислительные машины других классов, реализуются на основе гарвардской или принстонской архитектур. В микроконтроллерах, выполненных на основе гарвардской архитектуры, программы и данные располагаются в логически независимых блоках памяти с различными методами доступа. В микроконтроллерах, выполненных на основе принстонской архитектуры, программы и данные могут располагаться в общем блоке памяти; для обращения используется единый метод доступа.
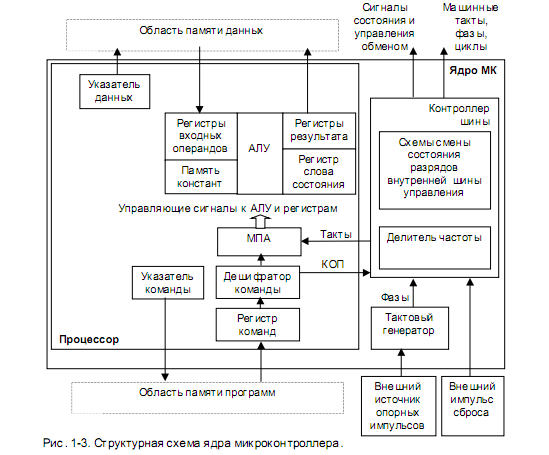
Ядро микроконтроллера. В состав ядра МК входят процессор, тактовый генератор и контроллер ши- ны (рис. 1-3). Процессор непосредственно осуществляет процесс переработки ин- формации, представленной в виде двоичных кодов, и управление этим процессом в соответствии с программой, представляющей собой последовательность команд. Тактовый генератор осуществляет формирование последовательности опорных сиг- налов, синхронизирующих протекание процессов в узлах МК, на основе внешней по- следовательности опорных импульсов. Контроллер шины осуществляет формиро- вание распространяемой по внутренней шине многофазной импульсной последова- тельности, тактирующей различные стадии выполнения команд в МК, и необходимой для организации обмена данными с периферийными устройствами МК. Команды располагаются по заданным адресам (номерам ячеек) в памяти команд и представляют собой управляющие коды, описывающие выполняемую опе- рацию и задающие операнды (данные, над которыми выполняется операция). Каждый МК обладает определенной системой команд, характеризуемой списком команд и их форматом. Список команд представляет собой набор операций, выполнение которых предусмотрено на процессоре данного МК. В списке команд любого МК можно выделить четыре группы операций: - операции передачи данных (между ячейками памяти МК, а также други- ми программно доступными элементами МК); - арифметические операции (сложение, вычитание, умножение, деление); - логические операции ("И", "ИЛИ", инверсия, исключающее "ИЛИ", раз- личные сдвиги); - операции передачи управления (безусловный переход по заданному адресу, переход по условию равенства или неравенства операндов, переход на под- программу и возврат из нее и т.п.). Формат команды позволяет определить тип выполняемой на очередном шаге программы операции, входные и выходные операнды, а также адрес команды, подлежащей выполнению на следующем шаге программы. Тип выполняемой команды задается кодом операции (КОП). Для задания операндов применяются следующие методы указания их ло- кализации (способы адресации): - неявная: операнд не указывается в связи с однозначностью доступа к нему (например, в связи с единственно возможным его размещением); - непосредственная: входной операнд помещается в тело команды (на- пример, с целью задания констант); - прямая: в команде указывается адрес в памяти данных, по которому расположен операнд; - косвенная: в команде указывается адрес ячейки в памяти данных, со- держащей адрес ячейки в памяти данных, по которому расположен операнд (напри- мер, при организации доступа к последовательно расположенным данным при неод- нократном повторении участка программы удобно изменять значение операнда ко- манды, тем самым меняя адрес искомого данного); - относительная: в команде указывается адрес ячейки в памяти данных, содержимое которой, будучи сложенное с некоторой величиной (например, зада- ваемой неявно), даст адрес ячейки в памяти данных, по которой расположен иско- мый операнд (например, при обращении к элементу таблицы данных, удобно опре- делять искомый операнд по смещению относительно начала таблицы). Адрес следующей исполняемой команды задается неявно как адрес памя- ти программ, следующий за адресом выполняемой в данный момент команды, что объясняется преобладанием в большинстве программ линейных участков последо- вательностей команд. Для его явного задания при организации циклов, подпро- грамм, ветвлений по условиям и т.п., применяют команды, КОП которых кодирует определенную операцию передачи управления. В состав систем команд большинства МК включены (по количеству адре- суемых в одной команде операндов) одно-, двух-, трех- и безадресные команды. Процедура выполнения команд в МК сводится к следующему. По окончании действия импульса сброса проводится инициализация реги- стров ядра МК. В указатель команды заносится адрес начального пуска. По адресу, содержащемуся в указателе команды, из области памяти про- грамм под воздействием управляющих сигналов, формируемых контроллером ши- ны, в регистр команд загружается очередная команда исполняемой контроллером программы. Выполнение любой команды представляет собой последовательность элементарных действий (микроопераций): определение количества требуемых для операции операндов, определение локализации необходимых операндов, их извле- чение, формирование кода действия для исполнительного блока, ожидание оконча- ния исполнения операции, определение локализации результатов, занесение ре- зультатов, определение адреса следующей команды и ряд других. Конкретный перечень микроопераций, реализуемый при выполнении очередной команды, опре- деляется ее КОП.
Память микроконтроллера. На кристалл микроконтроллера интегрированы два блока памяти: память программ и память данных. В связи с ориентацией МК на функционирование в авто- номном режиме память программ должна сохранять содержимое в отсутствие на- пряжения питания (т.е. являться энергонезависимой), а для упрощения внутренней архитектуры МК и возможности работы в широком диапазоне частот тактового гене- ратора память данных должна обладать статической архитектурой (т.е. не требовать регенерации). Обобщенная структура модуля памяти показана на рис. 1-4. Модуль памя- ти состоит из матрицы запоминающих элементов, организованной в виде N m- разрядных строк, дешифратора адреса ячейки и буферного каскада.
Разрядность шины адреса такого модуля памяти составляет n=log2N, а разрядность шины данных – m. Информация о номере подлежащей выборке ячейки в виде кода адреса поступает на дешифратор, активизирующий одну из строк мат- рицы запоминающих элементов генерацией высокого логического уровня на одном из своих выходов. При этом (в зависимости от поступающих сигналов управления) логические уровни всех запоминающих элементов выбранной строки поступают че- рез буферный усилительный каскад на шину данных (ситуация чтения состояния ячейки), либо передаются с шины данных через буферный усилительный каскад на запоминающие элементы выбранной строки (ситуация записи состояния ячейки). Ло- гические состояния запоминающих элементов прочих строк не изменяются и не ока- зывают влияния на выходные логические уровни. Энергонезависимая память программ является постоянным запоминаю- щим устройством (ПЗУ). Каждый запоминающий элемент ПЗУ находится в том логи- ческом состоянии, в которое он был переведен при занесении информации в ПЗУ (программировании). В зависимости от количества допустимых циклов записи управляющей программы в ПЗУ различаются однократно и многократно программируемые модули. В однократно программируемых ПЗУ каждый запоминающий элемент мат- рицы допускает только одну смену состояния. Запись программы в ПЗУ может про- изводиться либо в условиях промышленного производства при изготовлении кри- сталла микроконтроллера ("по маске"), либо пользователем с помощью программа- тора. ПЗУ такого типа наиболее дешевы, так как каждый элемент матрицы предель- но прост.
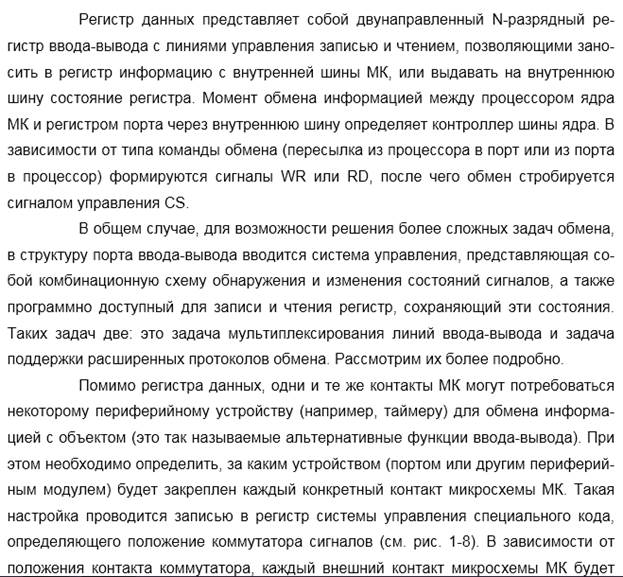
68. Параллельные порты ввода-вывода предназначаются для обмена микро-контроллера и внешнего объекта данными, представленными в виде логических сигналов, передаваемыми через линии ввода-вывода микросхемы. В общем случае с каждым портом связаны регистр данных (для хранения выводимой Из МК на объект информации или для хранения информации, введенной в МК с объекта), система управления (для задания режимов работы порта ) и выходной каскад, решающий Задачи усиления и сопряжения сигналов . Структура порта показана на рис. 1-8.
69.
70.
71.
72.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|