|
Принципы конструирования ПСА
Построение цепей управления давлением
В ходе технологического процесса
Тамбов 2003
ИЗУЧЕНИЕ ПНЕВМАТИЧЕСКИХ, ГИДРАВЛИЧЕСКИХ И КОМБИНИРОВАННЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| Цель работы:
| Изучение пневматических средств автоматизации и принципов построения пневматических систем управления
| | Задачи работы:
| 1. Изучить принципы конструирования пневматических средств автоматизации (ПСА).
2. Изучить пневматические исполнительные механизмы.
3. Изучить принципы построения пневматических приборов и регуляторов.
4. Изучить принципы построения пневматических систем управления.
5. Изучить средства гидроавтоматики.
6. Изучить гидравлические регуляторы и исполнительные механизмы.
7. Изучить принципы построения комбинированных систем управления.
|
ОБЩИЕ СВЕДЕНИЯ О ПНЕВМАТИЧЕСКИХ СРЕДСТВАХ АВТОМАТИЗАЦИИ
Пневматические средства автоматизации (ПСА) представляют собой технические устройства и приборы, использующие энергию сжатого воздуха. ПСА пожаро- и взрывобезопасны, обладают высокой надежностью при работе в условиях агрессивных сред, электромагнитных воздействий и изменений температуры; достаточно просты в эксплуатации. К недостаткам ПСА относят сравнительно низкое быстродействие, обусловленное небольшой скоростью передачи пневмосигналов (близкой к скорости звука в воздуховоде); сложность построения высокоточных вычислительных устройств; относительно высокую энергоемкость. Вследствие этого ПСА применяют чаще всего для автоматизации достаточно инерционных ТОУ с постоянными времени не менее 10-30 с; максимальная длина пневмокоммуникаций в таких системах управления не должна превышать 250-300 м; Несмотря на эти ограничения, в химической промышленности ПСА составляют 60-70% от общего числа средств автоматизации.
Принципы конструирования ПСА
Серийные ПСА строят на основе принципов компенсации перемещений и сил: принцип сравнения расходов пока не нашел применения в приборостроении.
Устройства и приборы ПСА, построенные на принципе компенсации перемещений, основаны на преобразователях пневмосигналов в линейные перемещения и содержат механические рычаги, тяги и другие элементы. Такие устройства имеют сложную механическую часть, обладают небольшими коэффициентами усиления и низкой эксплуатационной надежностью. Принцип компенсации перемещений широко применяют при конструировании ПСА, а также иногда используют при создании встроенных регуляторов.
Устройства ПСА, базирующиеся на принципе компенсации сил, содержат преобразователи давлений в усилия и мембранные компараторы. Для таких устройств характерны почти полное отсутствие механических узлов, малые перемещения чувствительных элементов и большие коэффициенты усиления. На этом принципе сконструированы пневматические устройства и приборы ГСП [1,2].
1.2. Конструктивное оформление ПСА
Отечественные ПСА имеют четыре условных уровня агрегатизации: элементный, модульный (агрегатный); приборный и блочный.
Под элементом в ПСА понимают законченную конструкцию, предназначенную для выполнения одной простой операции (усиление, сложение, преобразование и т.п.). Элементы условно классифицируют на простые (неделимые) и сложные (составные). Простые элементы (дроссели, емкости, мембраны, пружины и др.) не имеют самостоятельного значения в ПСА, их используют для конструирования более сложных элементов (типа пневмокамер, усилителей, реле и т.п.).
Совокупность элементов с унифицированными сигналами и единым конструктивным оформлением образует систему элементов. Применяемые системы элементов ПСА обычно избыточны, в их состав входят более сложные узлы, ячейки, модули с единым конструктивным оформлением. Отечественные ПСА базируются преимущественно на универсальной системе элементов промышленной пневмоавтоматики (УСЭППА), комплексе миниатюрных элементов и модулей пневмоавтоматики (КЭМП) и - частично - системе элементов струйной техники.
Элементы ПСА по характеру изменения сигналов во времени разделяют на аналоговые и дискретные. Сигналы аналоговых элементов изменяются в стандартном диапазоне (20-100) кПа, дискретные сигналы принимают условное значение «0» (не более 10 кПа) и «1» (не менее 110 кПа). Питание всех элементов УСЭППА и КЭМП осуществляется сжатым воздухом давлением (140±14) кПа.
Элементы УСЭППА и КЭМП конструктивно допускают "печатный" монтаж на платах с расположенными в них межэлементными каналами. Элементы УСЭППА имеют небольшие габаритные размеры - в среднем 40x40x50 мм; линейные размеры элементов КЭМП уменьшены в 1,5- 2 раза.
Элементы ПСА применяют для построения более сложных устройств - модулей (ячеек), выполняющих самостоятельные функции типа интегрирование, дифференцирование, запоминание и т.п. Конструктивно модуль представляет собой единое устройство, состоящее из группы элементов, которые закреплены на унифицированной плате и соединены внутренними коммуникационными каналами.
Модули с унифицированными информационными и конструктивными характеристиками называют агрегатами. Каждый агрегат предназначен для выполнения определенной функции системы контроля или регулирования, например сигнализации, стабилизации, регистрации.
Приборное конструктивное оформление ПСА предполагает размещение в корпусе одного прибора всех (или почти всех) ячеек, реализующих АСР -измерительного, задающего, регулирующего и регистрирующего устройства. Приборные ПСА строят по принципу компенсации перемещений, что снижает их функциональные возможности и усложняет эксплуатацию.
Блочное конструктивное оформление ПСА применяют при построении систем контроля и управления сложных ТОУ. В этом случае систему управления делят на ряд взаимосвязанных блоков, содержащих однотипные функциональные агрегаты или модули, например регуляторы, регистраторы, сигнализаторы и т.п. Блочная компоновка упрощает проектирование, монтаж и эксплуатацию пневматических систем управления. Блочный принцип построения широко используют при создании пневматических и пневмоэлектрических комплексов ТСА . [2, 3].
 Элементы и устройства пневматических средств автоматики Элементы и устройства пневматических средств автоматики

| ЭЛЕМЕНТЫ И УСТРОЙСТВА ПНЕВМАТИЧЕСКИХ СРЕДСТВ АВТОМАТИКИ
Под элементами в пневмоавтоматике понимают относительно простые функционально и (или) законченные конструктивно части более сложного устройства, предназначенные для выполнения одной сравнительно простой операции или преобразования сигнала.
Элементы условно можно классифицировать на простые (неделимые) и составные.
2.1. Простые элементы
К простым элементам относятся пневматические емкости, дроссели, пневмопроводы, мембраны, сильфоны, пружины и, наконец, механические рычаги. Из них собирают составные элементы: пневматические камеры, преобразователи, усилители, сумматоры. Каждый составной элемент выполняет одну операцию или функцию. Пневматическое устройство в целом реализует, как правило, ту или иную функцию переработки информации.
Емкости
Емкости предназначены для накопления сжатого воздуха. Параметры емкости ее объем V и (иногда) число вводов (выводов) потоков воздуха. Различают емкости постоянного и переменного объема (рис.1.1), причем в последнем случае объем V изменяют вручную. Входной координатой являются давление Р1 и расход G воздуха на входе в емкость, выходной - давление воздуха Р или его масса М в емкости.
 Подробнее о физической картине процесса. Подробнее о физической картине процесса.
|
| Переменные Р и М связаны между собой "уравнением состояния Клапейрона MRQ-PV (где R — универсальная газовая постоянная для воздуха, Q - абсолютная температура). В пневмоавтоматике используют пневматические емкости относительно небольших объемов (не более 30-50 см3). Поэтому при малых гидравлических сопротивлениях вводов и выводов давление Р во всех точках емкости устанавливается практически мгновенно, как только изменятся Р1 или G1. Поэтому при отсутствии дросселей на вводах и выводах потоков воздуха пневмоемкость можно рассматривать как усилительное звено с коэффициентом усиления давления, равным единице.
| 
Рис.1.1. Схемы пневматических емкостей постоянного (а) и переменного (б) объема
Рис. 1.2. Принципиальные схемы дросселей:
а - капилляр; б - жиклер; в -конус-цилиндр; г - конус—конус; д - цилиндр—цилиндр;
е - сопло-заслонка; ж - шарик-цилиндр.
Пневмоемкость не получила самостоятельного применения, однако в сочетании с дросселями на вводах и выводах ее широко используют для построения проточных и глухих камер.
Дроссели
Дроссели (пневмосопротивления) предназначены для создания местного гидравлического сопротивления движущемуся потоку воздуха и, следовательно, для изменения его расхода. Поэтому основной выходной координатой дросселя является расход воздуха G, а входными - давление воздуха до и после дросселя Р1и Р2 либо их разность DР=Р1-Р2.
По режиму течения воздуха дроссели делятся на ламинарные, турбулентные и смешанные; по способу создания сопротивления - на постоянные, регулируемые (вручную) и переменные; по виду статической характеристики - на линейные и нелинейные (рис.1.2).
Подробнее о дросселях.
|
| В ламинарных дросселях установившиеся линии токов воздуха не пересекаются друг с другом, скорость потока невелика (Re<2300), температура практически постоянна. Гидравлическое сопротивление создается за счет сил вязкого трения слоев воздуха друг с другом и со стенкой канала. Подобные ламинарные режимы наблюдаются в дросселях типа капилляр (рис.1.2, а) с большим отношением длины к диаметру (обычно L/d>10).
Для турбулентных дросселей характерны интенсивное хаотическое перемешивание линий токов воздуха, большие значения скоростей и критерия Re, малые отношения L/d и адиабатическое изменение состояния воздуха. Гидравлическое сопротивление создается за счет вихреобразований, особенно сильных при сужении и расширении струи воздуха. В турбулентных дросселях, например типа жиклер (рис.1.2, б), могут наблюдаться докритические (скорость потока меньше скорости звука) и надкритические (скорости потока и звука равны) режимы.
Деление дросселей на ламинарные и турбулентные условно, так как режим течения воздуха зависит и от конструкции дросселя, и от условий его работы, в частности от перепада давлений DР. Дроссели, в которых возможен и ламинарный, и турбулентный режим, называют смешанными.
В постоянных дросселях площадь проходного сечения не меняется; примерами таких дросселей служат упоминавшиеся капилляр и жиклер (рис.1.2 a, б). Постоянные дроссели (как и все другие) характеризуются только статическими характеристиками, так как в динамическом отношении они являются безынерционными звеньями: геометрические размеры каналов дросселей обычно очень малы (например, длина капилляра не более 20 мм, диаметр 0,18 или 0,32 мм), поэтому все переходные процессы, распространяющиеся со скоростью звука, заканчиваются в дросселях практически мгновенно.
К регулируемым дросселям относят конус-цилиндр, конус-конус, и цилиндр-цилиндр (рис.1.2, в-д). Перемещение h внутренних конусов или цилиндра осуществляется вручную и вызывает изменения площади F или гидравлического сопротивления кольцевого зазора. В регулируемых дросселях возможны турбулентные, ламинарные и переходные режимы истечения воздуха. Статические расходные характеристики таких дросселей описываются сложными нелинейными выражениями, в которые всегда входят экспериментально определяемые параметры. При небольших перепадах DР и перемещениях h регулируемые дроссели можно рассматривать. К регулируемым дросселям, обладающим линейными расходными характеристиками во всем диапазоне изменения DР, относятся так называемые пульсирующие сопротивления.
Переменные дроссели типа сопло-заслонка и шарик-цилиндр показаны на рис.1.2, е, ж. Перемещение заслонки и шарика осуществляется с помощью какого-либо другого элемента пневмоавтоматики. В дросселе первого типа изменение гидравлического сопротивления достигается за счет сил трения воздуха о сопло и заслонку и эффектов сжатия и расширения струи. Величина h мала (порядка 0,03-0,1 мм), поэтому дроссель чувствителен к перекосам и вибрациям заслонки. Дроссель второго типа более надежен, так как шарик самоцентруется в струе воздуха. Изменение расхода достигается изменением площади F и гидравлического сопротивления потоку воздуха при перемещении шарика. Для переменных дросселей характерен турбулентный режим течения воздуха. При малых изменениях h и DР статические характеристики переменных дросселей можно рассматривать как линейные в малом.
| Наибольшее распространение в пневмоавтоматике получили ламинарные дроссели типа капилляр (L =20 мм, d=0,18 и 0,32 мм) и конус-конус, а также турбулентные сопло-заслонка (h=0,03-0,1 мм, d=0,5 мм) и шарик-цилиндр.
Пневмопроводы
Пневмопроводы служат для передачи импульса давления или изменений расхода воздуха на достаточно большие расстояния L (от нескольких метров до 250—300 м). Пневмопроводы выполняют из пластмассовых или металлических трубок внутренним диаметром d=1-8 мм; иногда пластмассовые трубки объединяют в пневмакабели (рис.1.4, а, б). Пневмопроводы используют для соединения отдельных элементов и устройств внутри пневматических приборов (L  1-2 м, d 1-3 мм), а также для передачи сигналов от первичных преобразователей к приборам и от регуляторов к мембранным исполнительным механизмам (L<=250—300 м, d=4-8 мм). В первом приближении пневмопровод можно рассматривать как ламинарный дроссель типа капилляр. При этом, однако, нужно учитывать следующее: значительную пневматическую емкость, распределенную по всей длине L; большие гидравлические сопротивления, затрудняющие передачу сигналов и вносящие в них фазовые искажения. 1-2 м, d 1-3 мм), а также для передачи сигналов от первичных преобразователей к приборам и от регуляторов к мембранным исполнительным механизмам (L<=250—300 м, d=4-8 мм). В первом приближении пневмопровод можно рассматривать как ламинарный дроссель типа капилляр. При этом, однако, нужно учитывать следующее: значительную пневматическую емкость, распределенную по всей длине L; большие гидравлические сопротивления, затрудняющие передачу сигналов и вносящие в них фазовые искажения.
Рис. 1.3. Схемы одиночного пневмопровода (а) и пневмокабеля (б).
Пневмопроводы классифицируют на расходные и безрасходные.
Подробнее...
|
| В расходных пневмопроводах всегда есть расход воздуха (который служит характеристикой передаваемого сигнала) и потери давления на преодоление сил вязкого трения слоев воздуха друг о друга и о стенку. При расчете расходных пневмопроводов стремятся уменьшить гидравлическое сопротивление потоку воздуха, увеличивая площадь проходного сечения и снижая линейную скорость .Это ведет к увеличению емкости пневмопровода и ухудшению его динамических характеристик, поэтому соотношения диаметра и длины пневмопровода должны быть оптимальны.
Наибольшее распространение в пневмоавтоматике получили безрасходные пневмопроводы, предназначенные для передачи сигналов в виде давления на большие расстояния. При изменении давления Р1 на входе в пневмопровод возникает волна уплотнения, распространяющаяся по всему объему со скоростью звука w и вызывающая перетоки (расходы) воздуха. Однако, в статических режимах давление P(l,t)=P1, и расход воздуха G(l,t) в пневмопроводе равен нулю.
| Мембраны
Мембраны применяют в пневмоавтоматике для преобразования давления воздуха в перемещение или в силу. Мембраны делят на упругие и «вялые».
Упругие мембраны выполняют из тонких металлических пластин (сталь, бронза, латунь). Они обладают достаточно большой собственной жесткостью, их статические характеристики, представляющие зависимость перемещения h центра мембраны или развиваемой силы Ф от давлений P1 и Р2 или перепада DР=Р1—Р2, обычно нелинейны. Применяют плоские и гофрированные упругие мембраны (рис.1.4, a,б). Наличие гофров делает статическую характеристику мембраны более линейной.

Рис. 1.4. Принципиальные схемы мембран:
а, б —упругой, плоской и гофрированной; в, г — «вялой» плоской и гофрированной;
д — двойной гофрированной.
Упругие мембраны используют преимущественно как чувствительные элементы в первичных преобразователях, например в дифманометрах.
«Вялые» мембраны выполняют из прорезиненной тонкой ткани (капрон, шелк, полотно). К ним предъявляют два требования - отсутствие собственной жесткости и большая прочность. Эти требования вытекают из основного назначения «вялых» мембран — преобразовывать большие перепады давлений (до 105 Па) в силу при крайне малых перемещениях (порядка сотых долей мм). «Вялые» мембраны обычно снабжены металлическим жестким центром. Они могут быть плоскими гофрированными (рис.1.4, б, з).
Статическая характеристика "вялой" мембраны
|
| Статическая характеристика «вялой» мембраны представляет зависимость силы Ф от перепада DР:
Ф= DР Fэ (1)
где Fэ - эффективная площадь мембраны, причем всегда Fэ <pd2м/4 (dм - диаметр мембраны, равный диаметру фланцев, между которыми она зажата). Выражение (1) справедливо при малых перемещениях жесткого центра мембраны (или, точнее, когда Fэ не зависит h) и пренебрежимо малой жесткости самой мембраны. В общем случае Fэ зависит от перемещения h, что делает функцию (1) нелинейной по аргументу DР, так как h, в свою очередь, определяется DР. Тогда
Ф= DР Fэ(h) = DР Fэ[h(DР)] (1а)
Для ослабления зависимости Fэ от h и уменьшения нелинейности функции (1а) применяют гофрированные мембраны (рис.1.4, г). Однако при смене знака DР возможно резкое изменение положения гофров («прохлопывание»), что влияет на Fэ и делает статическую характеристику (1а) существенно нелинейной. Для борьбы с «прохлопыванием» применяют двойные гофрированные мембраны (рис.1.4. д).
| Тонкие «вялые» мембраны широко применяют в различных устройствах пневмоавтоматики, построенных на принципе сравнения сил (сумматоры, усилители, повторители). Недостатком таких мембран является довольно быстрая потеря эластичности и изменение статических характеристик как во время работы, так и при длительном хранении.
В пневматических исполнительных механизмах широко используют многослойные прорезиненные мембраны больших диаметров dм, предназначенные для преобразования перепада DР в большие усилия, необходимые для перемещения регулирующих и запорных органов. В этих мембранах перемещение жесткого центра достигает 20-60 мм, что, естественно, увеличивает нелинейность статической характеристики.
Сильфоны
Сильфоны предназначены для преобразования давления или силы в перемещения (рис.1.5.). Они представляют собой упругие тонкостенные гофрированные оболочки (трубки), изготовляемые из бронзы с различными присадками или из специальных сталей. Наличие гофров позволяет перемещать днище сильфона на значительное расстояние (десятки миллиметров) без заметного изменения его характеристик. Выходная координата сильфона - перемещение h, входные - давления Р1 и Р2 или их разность DР либо сила Ф.
Рис. 1.5. Принципиальная схема сильфона.
Статическая характеристика сильфона
|
| Сильфоны обладают достаточно большой собственной жесткостью (для увеличения которой в них иногда вставляют пружины), поэтому при малых изменениях DР их статические характеристики считаются линейными:
h=Ф/kc=Fэ(P1-P2)/kc (2)
где kc - коэффициент жесткости сильфона; Fэ - эффективная площадь, практически не зависящая от перемещения h. Статическая характеристика (2) иногда имеет гистерезис, зона которого зависит от коэффициента жесткости, размеров и числа гофров и т.п. Для уменьшения зоны гистерезиса применяют пружины.
Статические характеристики сильфонов очень незначительно изменяются во времени, поэтому сильфоны все шире и шире применяют в различных ответственных устройствах пневмоавтоматики. Как правило, их используют для работы на сжатие, т.е. при P1>P2, однако при малых перемещениях допустимо применение сильфонов при P1< P2, т. е. при работе на растяжение.
| Пружины
Пружины предназначены для преобразования силы в перемещение, часто -значительное. По форме они делятся на цилиндрические и профильные (рис.1.6, а, б), по направленности действия - на пружины сжатия, растяжения, кручения и (реже) изгиба. Выходная координата пружины - перемещение h, входная - сила Ф.
Статическая и динамическая характеристики пружин
|
| Статическая характеристика пружины: h =Ф/kn (где kn - коэффициент жесткости пружины, зависящий от материала, диаметра проволоки d1, диаметра пружины d, числа витков п).
В динамическом отношении пружина является колебательным звеном. Как и силъфон, при малых частотах w пружину можно рассматривать как усилительное звено с коэффициентом передачи kn.
| На рис.1.6, в показано условное обозначение пружин на принципиальных схемах пневмоавтоматики.
Рис. 1.6. Схемы пружин:
а - цилиндрические; б - профильной; в - условные обозначения. |
Механические рычаги
Рычаги представляют собой механические стержни с одной или двумя осями вращения, которые либо перемещаются в пространстве, либо закреплены неподвижно (рис.1.7, а, б). Рычаги применяют для суммирования и усиления перемещений и сил.
Рис.1.7. Принципиальные схемы рычажных сумматоров перемещении (а) и усилий (б).
Сложные элементы ПСА.
К ним относят пневматические камеры, дроссельные делители, преобразователи перемещений и сил в давление, усилители давления и мощности, сумматоры и реле.
Пневмокамеры служат для аккумуляции сжатого воздуха и изменения его давления во времени по определенному закону. Камера состоит из емкости объемом V и нескольких ПС на вводах. Различают глухие камеры с одним вводом V, (рис.1.8, a) и проточные камеры, у которых два и более ввода (рис.1.8, б).

Рис.1.8. Схемы камер:
а- глухой; б - проточной; в дроссельного делителя
Дроссельные делители предназначены для суммирования давлений Р1, Р2,...,Рm с весами k1, k2,...,km. Делители строят на базе проточных камер малого объема с ламинарными ПС проводимостью aj (j = 1,2,..., m). Суммарное давление в камере делителя

где kj=aj/(a1 + а2+ ... +аm);
Статическая погрешность делителя при близких Рj не превышает 2-4% и зависит от способа измерения Р. В динамическом отношении делители рассматривают как усилительные звенья в области частот [0; 0,7] рад/с. В ПСА чаще всего используют делители с m=2 и V=0; схема этого элемента показана на рис.1.9, в.
Преобразователи перемещений и усилий в давление
Эти элементы предназначены для преобразования малых перемещений и усилий в достаточно большие изменения давления воздуха. Эффект преобразования осуществляется чаще всего элементом, содержащим переменный дроссель.
Преобразователь перемещения в давление типа сопло-заслонка показан на рис.1.9, а. В него входят постоянный дроссель, проточная камера небольшого объема и переменный дроссель, построенный на пневматическом сопле и заслонке. Перемещения заслонки h приводят к изменению гидравлического сопротивления вытекающей из сопла струи и соответственно - давления Р в камере. При удалении заслонки от сопла на 0,15—0,20 мм давление Р становится равным нулю.
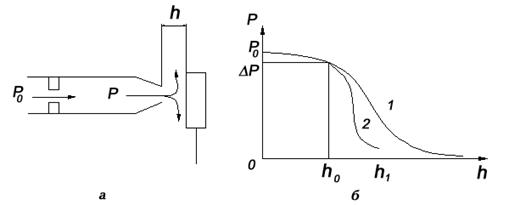
Рис.1.9. Преобразователь перемещения в давление типа сопло-заслонка:
a- принципиальная схема; б - статическая характеристика;
l - преобразователь с постоянным давлением Р0;
2 — преобразователь с постоянным перепадом DР—Р0—Р.
Описанный преобразователь не имеет обратной связи, поэтому плохо работает при перекосах заслонки, вибрациях, колебаниях давления воздуха и т.п.
Наибольшее распространение в пневмоавтоматике получил преобразователь перемещения в давление с отрицательной обратной связью, (рис.1.10, а). Он состоит из проточной камеры с постоянным и переменным дросселем, сильфона обратной связи и механического рычага - сумматора перемещений.

Рис 1.10.. Принципиальные схемы преобразователей с обратной связью:
а -перемещения в давление: б — силы в давление; в — силы в давление (типа шарик - седло).
Принципиальная схема преобразователя силы в давление приведена на рис.1.10, б. Преобразователь состоит из проточной камеры с постоянным и переменным (типа сопло — заслонка) дросселями, сильфона обратной связи и рычажного преобразователя усилий в перемещение.
На рис.1.10, в показана схема преобразователя силы (или перемещения) в давление, базирующегося на переменном дросселе типа шарик — седло (шарик — цилиндр).
Рис.1.11. Принципиальные схемы усилителей давления типа сопло -заслонка:
а - с постоянным давлением P0; б - с постоянным перепадом DР=Р0-Р;
1 - пружина; 2— дроссель; 3 — проточная камера.
Преобразователи шарикового типа применяют для построения усилителей давления и (чаще) мощности (расхода) пневматических сигналов.
Одновходовые усилители строят на базе переменного ПС типа сопло -заслонка и стабилизатора перепада давления Р0 - Р (рис.1.12, а).
Двух- и четырехвходовые усилители конструируют на основе двух последовательно включенных переменных ПС типа сопло-заслонка и мембранного сумматора сил, формируемых давлениями Р1, Р2, или Р1 - Р4. (рис.1.12, б, в).
Усилители давления УСЭППА называют элементами сравнения: трехмембранный элемент П2ЭС.1 (рис. 2.14, 6) сравнивает два давления Р1 и Р2 и в зависимости от знака их разности формирует на выходе сигнал "0" или "1" (в системе КЭМП аналогичный элемент назван компаратором КАМП). В пятимембранном элементе П2ЭС.З сравнивают три давления (на рис.2.12, в камера Д соединена с атмосферой); выходной сигнал вне зоны линейности равен нулю или единице.
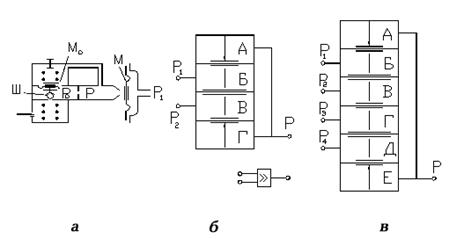
Рис.1.12. Схемы усилителей давления:
а - двухвходового; в - четырехвходового
Элементы сравнения используют для построения сумматоров двух, трех или четырех давлений. Для этого в камеру Д четырехвходового усилителя (рис. 2.12, в) вводят сигнал отрицательной обратной связи из камеры Е. В этом случае равновесие мембранного сумматора сил возможно на линейном участке статической характеристики при Р=Р1-Р2+Р3. На этом усилителе можно выполнять разные операции: при Р1=PБ=РГ имеем Р=2Р1-Р2; при Р1=Рk=0 получим Р=Р1 - Р2; при Р2=РВ=0 имеем P=P1+P3; при РВ=РД=Р получим Р=(Р1+Р3)/2. В динамическом отношении сумматоры представляют усилительный элемент при частотах до 10-20 рад/с; основная погрешность сумматора на базе П2ЭС.З не выше 0,5%.
В состав КЭМП входит сильфонный сумматор трех давлений типа СМАМП, основная погрешность суммирования - 0,5%.
Усилители мощности предназначены для увеличения расхода воздуха без существенного изменения его давления. Такие усилители называют пневмоповторителями и применяют для разделения пневматических устройств на независимые по расходу части. Различают точные (маломощные) и грубые (мощные) повторители, имеющие разные классы точности и расходы воздуха.
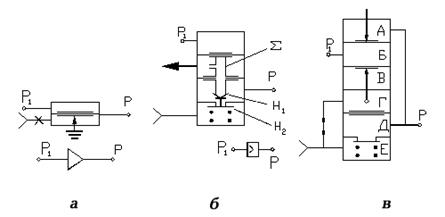
Рис.1.13. Схемы пневмоповторителей:
а - точного маломощного типа П2П.1; б - грубого мощного типа П2П.З; в - точного мощного типа П2П.7
В КЭМП входят точные маломощные повторители без сдвига ПАМП-1 (класс точности 0,25) и со сдвигом ПАМП-2 (класс точности 0,5), а также мощный усилитель ПАМП-3 (класс точности 0,5, расход воздуха 1500 л/ч).
Релейные элементы ПСА используют для реализации зависимости P=signDP (где DP =Р1-Р2; Р1, Р2 входные сигналы). Реле строят на базе двухвходовых усилителей давления с положительной обратной связью и регулируемым смещением С статических характеристик. Для создания смещения в одну из камер усилителя вводят малое или большое давление подпора, равное 30-40 или 70-80% от давления питания Рn (на схемах ПСА камера малого подпора имеет одинарную штриховку, большого - двойную).
В составе КЭМП специальных релейных элементов нет, их функции выполняют клапаны.
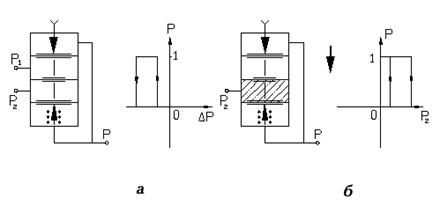
Рис.1.14. Схемы и статические характеристики реле:
а--без смещения; б—со смещением.
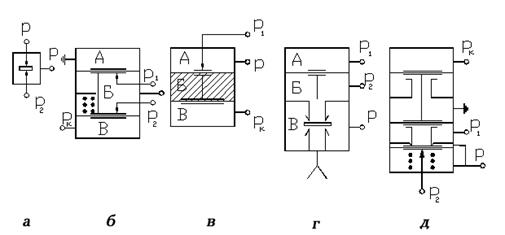
Рис.1.15. Схемы клапанов:
а - безмембранный типа ПЗК.5; 6 -выключающее реле П-1108; в - одноконтактный клапан ПЗК.1;
г — модуль интегральный П1МИ; д - клапан КЛАМП
Для коммутации пневматических сигналов и реализации простейших логических операций в ПСА применяют выключающие реле и клапаны.
Для формирования пневмосигналов определенного уровня в ПСА используют задатчики.
|
| Их строят на базе дроссельных делителей (см. рис.1.8, в), один из вводов которого соединен с источником питания, а другой - с атмосферой; точного маломощного повторителя со сдвигом (рис.1.16, а) и проточной камеры с регулируемым ПС типа шарик - цилиндр (рис.1.16, 6). В УСЭППА входят задатчик П23Д.З (рис.1.16, 6), устанавливаемый перед глухими камерами, и мощный задатчик П23Д.4 с дополнительным усилителем мощности. В КЭМП имеется маломощный задатчик ЗАМП-1.
 Рис. 1.16. Схемы задатчиков: а — маломощного; б —типа П23Д.З
Рис. 1.16. Схемы задатчиков: а — маломощного; б —типа П23Д.З
| Дискретные сигналы в ПСА формируют с помощью пневмокнопок и тумблеров.
|
| Эти элементы конструируют на базе регулируемых ПС типа сопло-заслонка или шарик-цилиндр. Схема пневмокнопки П1КН.З показана на рис.1.17. При нажатии на кнопку 1 шток 2 открывает заслонку 3 и давление Рп проходит на выход. В пневмотумблере П1Т.2 перемещение штока осуществляет рычаг, фиксирующий "открытие" или "закрытие" тумблера.
 Рис. 1.17. Схема пневмокнопки
Рис. 1.17. Схема пневмокнопки
| Пневмокнопки используют и как конечные выключатели (элемент П1ВК. 1).
Устройства ПСА
К устройствам, состоящим из нескольких элементов, условно относят мощные повторители, интеграторы, умножители, дифференциаторы, сумматоры, селекторы, квадраторы и т.п. Некоторые из этих устройств конструктивно оформлены как единое изделие (например, сумматоры, дифференциаторы и т.д.), другие устройства (интеграторы, генераторы и т.п.) используют только как составные части приборов и регуляторов.
Точные мощные повторители строят на базе повторителя типа П2П.7 и оформляют как самостоятельное изделие, либо конструируют на основе двухвходового усилителя давления и грубого повторителя, охваченных отрицательной обратной связью ОС (рис.1.18, а). Такой повторитель ПП1.5 имеет класс точности 0,5 и обеспечивает расход воздуха 180- 200 л/ч.
Устройство алгебраического суммирования типа ПФ1.1М1 реализует с погрешностью 1% зависимость P=P1-Р2+Р3-H1+Н2, где Р1-Р3 - входные сигналы, H1, Н2 - опорные давления из интервала (20 -100) кПа. В состав устройства (рис.1.18, б) входят семимембранный элемент сравнения, усилитель мощности, два задатчика и линия обратной связи ОС.
Умножители сигнала на константу k с погрешностью 0,5% выполняют операцию P=k(P1-H)+H, где k  (0,2, 1) или k [1, оо], Н=20 кПа. Устройство умножения ПФ1.3.9 (рис.1.19) состоит из задатчика для получения сигнала Н, дроссельного сумматора, двухвходового усилителя УС, охваченного отрицательной обратной связью ОС, и усилителя мощности типа П2П.7. Переключатели П1 и П2 служат для установки диапазона изменения k (для k < 1 коммутация сигналов показана на рис.1.19 сплошными линиями). (0,2, 1) или k [1, оо], Н=20 кПа. Устройство умножения ПФ1.3.9 (рис.1.19) состоит из задатчика для получения сигнала Н, дроссельного сумматора, двухвходового усилителя УС, охваченного отрицательной обратной связью ОС, и усилителя мощности типа П2П.7. Переключатели П1 и П2 служат для установки диапазона изменения k (для k < 1 коммутация сигналов показана на рис.1.19 сплошными линиями).
Простейший интегратор реализуют с помощью глухой камеры с постоянной времени Г и ламинарным ПС. Он не имеет обратной связи и обеспечивает приемлемую точность только при малых (по сравнению с Т) значениях времени интегрирования.
Рис.1.18. Схемы пневматических устройств:
а - точного мощного повторителя; б - мембранного сумматора.

Рис.1.19. Схема устройства умножения на константу.
Чаще всего интеграторы строят на базе мембранного сумматора и глухой камеры объема V, охваченных положительной обратной связью (рис.1.20, а).
Устройства дифференцирования строят на основе трехмембранного усилителя УС, охваченного отрицательной обратной связью ОС с глухой камерой (рис.1.20, б).

Рис.1.20. Схемы пневматических устройств:
а - интегратора; б - дифференциатора; в - прямого предварения; г - обратного предварения.
Серийное устройство прямого предварения типа ПФ2.1 (рис.1.20, в) снабжено выключающим реле ВР (позволяющим при Рк=0 блокировать действие дифференциатора) и точным мощным повторителем П2П.7. Для ослабления автоколебаний, возникающих в контуре "УС-ОС", в устройстве используют емкость Е с сильфоном.
Устройство обратного предварения типа, ПФ3.1 (рис.1.20, г) реализует теоретический закон P(t) = P1(t) - TпP(t), где параметр Тп варьируют от 3 до 6000 с регулируемым дросселем «в».
Селекторы в ПСА служат для выбора наибольшего (наименьшего) сигнала из двух сравниваемых P1 и Р2. Селектор типа ПФ 4/5.1 (рис.1.21) состоит из усилителя давления УС, выключающего реле ВК, усилителя мощности П2П.7 и переключателя П1. Если P1 >Р2, то Рк=0, и сигнал Р1 поступает через ВК и усилитель на выход. Для настройки селектора на выбор меньшего давления в переключателе П1 каналы коммутируют в соответствии с пунктирными линиями.
Устройство ограничения сигналов типа ПП11.1 служит для ограничения сверху (снизу) входного давления Р1; конструктивно это устройство аналогично селектору ПФ 4/5.1, однако вместо сигнала Р2 вводят постоянное давление Н от задатчика. Тогда ПП11.1 реализует операцию: Р= Р1 при Р1<Н и Р=Н при Р1>Н.
Устройство извлечения квадратного корня (квадратор) типа ПФ1.17 предназначен для реализации с погрешностью 1% функции Р=[80 (Р1-Н)]0,5+ Н.
Рис.1.21. Схема селектора:
1 - элемент сравнения; 2 - выключающее реле; 3 - усилитель мощности; 4 - переключатель.

Рис.1.22. Схема квадратора.
Рис.1.23. Схемы устройства преобразования рода сигнала:
а - пневмоэлектрический преобразователь ППЭ-2; б - электропневматический преобразователь ЭП-0000;
в - герконовый преобразователь типа ППЭД.1; г - преобразователь типа П1ПР.5.
Преобразователи пневмоэлектрические и электропневматические предназначены для преобразования рода энергии непрерывных сигналов.
Не нашли, что искали? Воспользуйтесь поиском по сайту:
©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|

