|
|
Интерфейс устройств ввода – вывода БИС КР580 ВВ 51.Основное назначение БИС КР580ИК51 и КР580ИК55 - коммутация и двухсторонняя передача потоков информации от ЦП к устройствам ввода/вывода и наоборот. БИС КР580ИК55 обеспечивает коммутацию, передачу и прием параллельных потоков информации, БИС КР580ИК51 -прием параллельной информации от ЦП, ее преобразование в последовательный поток символов я передачу их на внешние устройства, а также выполняет передачу от внешних устройств последовательной информации, преобразованной в параллельный код, к ЦП, БИС может работать в синхронном и асинхронном режимах. Программируемость режимов БИСКР580ИК51 и КР580ИК55 обеспечивает возможность сопряжения устройства обработки данных практически со всеми внешними устройствами, работающими как в параллельном, так и в последовательных кодах. Применение этих БИС возможно и в других микропроцессорных комплектах, а также автономно в средствах вычислительной техники, автоматики, связи. программируемый последовательный интерфейс КР580ВВ51 представляет собой универсальный синхронно-асинхронный приемо-передатчик (УСАПП), предназначенный для организации обмена между МП и внешними устройствами в последовательном виде. Он принимает данные с 8-ми разрядной шины данных МП и передаёт их в последовательном виде периферийному устройству или получает последовательные данные от периферийного устройства, преобразует их к параллельному виду и передаёт МП. Последовательный интерфейс может осуществлять обмен данными в асинхронном режиме со скоростью передачи 9,6 кбит/с или в синхронном – со скоростью до 56 кбит/с. Длинна передаваемых слов – от 5 до 8 бит. Формат слова содержит также служебные биты и необязательный бит контроля по чётности.
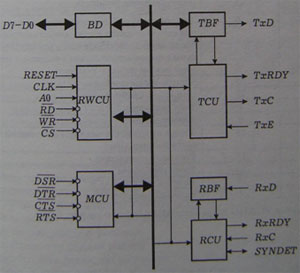
Структурная схема УСАПП (рис1) содержит:
· буфер передатчика TBF со схемой управления передатчиком TCU, который предназначен для приёма данных от МП и выдачи их в последовательном виде на выход TxD; · буфер приёмника RBF со схемой управления приёмником RCU, которая выполняет приём последовательных данных со входа RxD и передачу их в МП в параллельном виде; · буфер данных BD ,который представляет собой параллельный 8-разрядный двунаправленный буфер шины данных, который используется для обмена данными и управляющими словами между МП и УСАПП; · блок управления чтением/записью RWCU, который принимает управляющие сигналы от МП и генерирует внутренние сигналы управления; · блок управления модемом MCU, который обрабатывает управляющие сигналы, предназначенные для внешнего устройства.
рис 1 После записи управляющих слов УСАПП готов к обмену данными в одном из пяти режимов:
1) синхронная передача; 2) синхронный приём с внутренней синхронизацией; 3) синхронный приём с внешней синхронизацией; 4) асинхронная передача; 5) асинхронный приём.
При синхронной передаче данных на выходе TxD с частотой сигнала синхронизации формируется последовательность, которая начинается с символа синхронизации, потом передаются коды символов, которые поступают с МП, каждый из которых может заканчиваться битом контроля. Если МП на загрузил очередной символ к моменту передачи, то УСАПП вставляет в передаваемую последовательность символы синхронизации, а на выходе TxD генерируется сигнал высокого уровня, который указывает на пустую передачу. В режиме синхронного приёма с внутренней синхронизацией УСАПП начинает работу с поиска во входной последовательности символов синхронизации. После обнаружения символов синхронизации на выводе SYNDET устанавливается сигнал высокого уровня и начинается приём входных данных. Сигнал на выводе SYNDET автоматически сбрасывается при чтении слова состояния УСАПП.
Во время синхронного приёма с внутренней синхронизацией на вывод SYNDET подаётся сигнал из внешнего устройства, который позволяет прём данных на входе RxD со скоростью сигналов синхронизации, которые поступают на вход RxC. Возможна организация приёма данных в МП по прерыванию, если сигналы на выходе SYNDET используются как запрос прерывания.
В режиме асинхронной передачи последовательные данные формируются на выходе TxD по заднему фронту сигнала синхронизации TxC с периодом, который задаётся управляющим словом и равняется 1, 16 или 64 периодам сигнала синхронизации. Если после передачи символа следующего символа нет, то на выходе TxD устанавливается напряжение высокого уровня до тех пор, пока новые данные не прейдут из МП. В программе, которая реализует алгоритм асинхронной передачи, запись следующего байта в УСАПП производится по команде вывода OUT, если в слове состояния разряд D0=1. Сигнал на выходе TxRDY используется как сигнал запроса прерывания.
Асинхронный приём данных начинается с поиска старт-бита, который устанавливает на входе RxD напряжение низкого уровня. Наличие этого бита проверяется внутренним строб-импульсом. Если старт-бит подтверждён, то запускается внутренний счётчик битов, который определяет начало и конец битов данных, бит контроля и стоп-бит. Приём стоп-бита указывает на завершение приёма байта информации и сопровождается установкой сигнала высокого уровня на выходе RxRDY. КР580ВН59 БИС программируемого контроллера прерываний (ПКП) КР580ВН59 представляет собой устройство, реализующее до 8 уровней запросов на прерывание с возможностями программного маскирования и изменения дисциплины обслуживания прерываний. За счёт каскадного включения БИС КР580ВН59 число уровней прерывания может быть расширено до 64.
Упрощённая структурная схема ПКП приведена на рис 1.
В состав БИС входят: двунаправленный 8-ми разрядный буфер данных (BD), предназначенный для сопряжения ПКП с системной информационной шиной; блок управления записью чтением (RWCU), принимающий управляющие сигналы от МП и задающий режим функционирования ПКП; схема каскадного буфера-компаратора (CMP), используемая для включения в систему нескольких ПКП; схема управления (CU), вырабатывающая сигнал прерывания и формирующая 3-х байтную команду CALL для выдачи на шину данных; регистр запросов прерываний (RGI), используемый для хранения всех уровней прерывания, на которые поступают запросы; схема принятия решений по приоритетам (PRB), идентифицирующая приоритеты запросов и выбирающая запрос с наивысшим приоритетом; регистр обслуживаемых прерываний (ISR), сохраняющий уровни запросов прерываний, находящихся на обслуживании ПКП; регистр маскирования прерываний (RGM), обеспечивающий запрещение одной или нескольких линий запросов прерывания. ПКП позволяет реализовать процесс прерывания по запросам от внешних устройств или по опросу микропроцессором запросов на обслуживание внешних устройств. При обслуживании прерываний по запросу от внешних устройств выполняется следующая последовательность операций: запросы прерываний поступают на входы IR0-IR7 и устанавливают соответствующие разряды RGI; ПКП принимает запросы, оценивает их приоритеты и формирует сигнал прерывания INT; МП принимает сигнал INT, если прерывания разрешены, и подтверждает приём выдачей сигнала INTA; после получения сигнала INTA ПКП устанавливает разряд регистра ISR, соответствующий запросу с наивысшим приоритетом, сбрасывает соответствующий разряд и выдаёт на шину данных D(7-0) код команды CALL; МП выдаёт ещё два сигнала INTA, которые позволяют ПКП передать на шину данных 16-разрядный адрес подпрограммы обслуживания прерывания, причём младший байт адреса передаётся по первому сигналу INTA, а старший – по второму.
При обслуживании прерываний по опросу микропроцессор производит считывание кода номера запроса с высшим уровнем приоритета по сигналу RD. приём запросов, маскирование и анализ приоритета выполняется так же, как и при обслуживании прерываний по запросу.

Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|