|
|
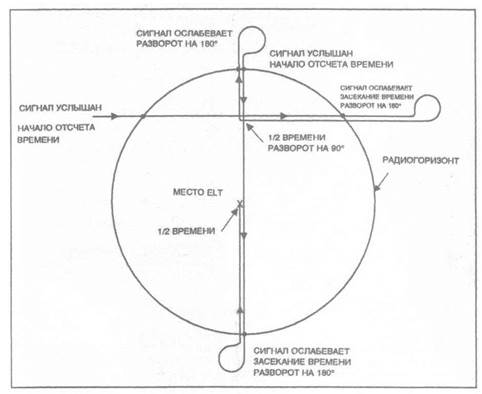
Схемы электронного поискаПоиск с помощью аварийно-спасательных маяков 4.3.18 Когда известно или предполагается, что воздушное судно или лица, терпящие бедствие, 4.3.19 При электронном поиске ширина охвата и интервал между линиями пути должны Таблица 11-4-4. Расстояние до горизонта Относительная Расстояние до Относительная Расстояние до высота в метрах горизонта в км высота в метрах горизонта в км 150(500) 46 (25) 3050(10 000) 211 (114) 300 (1000) 67 (36) 4550 (15 000) 259 (140) 600 (2000) 94(51) 6100(20 000) 298 (161) 900 (3000) 115(62) 7600 (25 000) 333(180) 1200(4000) 133(72) 9150(30 000) 367(198) 1500(5000) 148(80) 10 650(35 000) 396(214) 4.3.20 При электронном поиске может использоваться одна из следующих схем: а) Поисковое воздушное судно, способное выполнять полет на привод. При этой схеме поисковое воздушное судно приводится на аварийный приводной передатчик (ELT), как только происходит обнаружение его сигнала. Сигнал ELT может быть быстро принят, если поисковое воздушное судно будет лететь в направлении нулевой точки вероятного района. Если это не принесет успеха, то необходимо будет вести систематический поиск, используя схему параллельных линий пути поиска с интервалом между ними, основанном на известной или расчетной дальности распространения сигнала ELT. Примечание. В гористой местности или местности с густой растительностью дальность распространения сигнала будет значительно меньше такой дальности на суше с ровной поверхностью. 130 b) Поисковое воздушное судно, неспособное выполнять полет на привод. 1) Слуховой поиск. Воздушное судно выполняет полет по схеме "заход по коробочке" на основе предположения, что равносигнальная зона аварийного приводного передатчика является круговой. Как только сигнал будет услышан в первый раз, на карте отмечается местоположение воздушного судна. Пилот продолжает полет на небольшом расстоянии по тому же курсу, а затем делает разворот на 90° влево или вправо и следует по новому курсу до постепенного исчезновения сигнала. Это местоположение фиксируется. Затем воздушное судно делает разворот на 180°, и опять наносятся на карту местоположения, где сигнал слышен и где он ослабевает. После этого может быть определено приблизительное местоположение ELT посредством проведения хордовых линий между каждой парой местоположений "сигнал услышан" и "сигнал ослабевает", а затем к каждой хорде проводятся перпендикулярные биссектрисы. Теперь воздушное судно следует к местоположению в точке пересечения биссектрис и снижается до удобного эшелона для визуального поиска (см. рис. 11-4-21). Существует еще один метод, который может быть применен любым пилотом, включая тех пилотов, которые не были обучены поисково-спасательным операциям. Когда сигнал услышан, пилот засекает время, продолжает полет по тому же курсу до тех пор, пока сигнал не ослабевает, и устанавливает, в течение какого времени сигнал был слышен. Пилот делает разворот на 180° и осуществляет полет на протяжении половины этого времени, затем делает поворот вправо или влево на 90° и продолжает полет до тех пор, пока сигнал не ослабевает. Пилот делает еще один поворот на 180° и определяет время, в течение которого сигнал слышен. Когда сигнал ослабевает, пилот снова устанавливает, в течение какого времени был слышен сигнал, делает поворот на 180° и осуществляет полет в течение половины этого времени, чтобы прибыть к месту (см. рис. И-4-22). Примечание. При этом могут быть очень полезными рейсовые воздушные суда. Их следует просить вести прослушивание на частоте 121,5 МГц и сообщать местоположения, где сигнал был впервые услышан и где он был потерян.
Рис. 11-4-21. Поисковое воздушное судно, неспособное выполнять полет на привод - метод 1 131
Рис. 11-4-22. Поисковое воздушное судно, неспособное выполнять полет на привод - метод 2 2)Измеряемый поиск. Сигнал ELT измеряется с помощью имеющегося в приемнике измерителя уровня сигнала. Во время следования воздушного судна по первоначальному курсу в район поиска фиксируются два местоположения с равными показаниями измерителя и определяется средняя точка между ними. Эта точка совпала бы с точкой максимального уровня при наличии возможности точного установления ее местоположения. Затем пилот разворачивает воздушное судно на 180° и по достижении средней точки выполняет разворот на 90° влево или вправо. Если сигнал после этого ослабевает, что означает следование судна в ложном направлении, то пилот должен развернуть его. чтобы взять обратный курс. На этом курсе также фиксируются две точки равных показаний измерителя. После прохода второй точки равных показаний пилот выполняет разворот на 180° и снижается до приемлемой высоты для визуального поиска. Установлено, что данный метод поиска, если он осуществляется с должным вниманием, очень точен (см. рис. И-4-23). Примечание. При таком типе поиска рейсовые воздушные суда могут также оказаться полезными, поскольку они могут сообщать о двух местоположениях с равными показаниями измерителя. 132
Рис. 11-4-23. Измеряемый поиск 
Не нашли, что искали? Воспользуйтесь поиском по сайту: ©2015 - 2024 stydopedia.ru Все материалы защищены законодательством РФ.
|